 Tue Feb 27 13:17:00 2018, Steven Block, WIndows Connection problem with drs507 SOLVED Tue Feb 27 13:17:00 2018, Steven Block, WIndows Connection problem with drs507 SOLVED
|
Hello All,
I too have been struggling with trying to get the drs4 (507) to work on my windows machine and I found it to be a problem with the libusb library. My solution is as follows and has worked on multiple PC's. I ran this solution after I first plugged in the drs4 and installed 507.
Go to http://zadig.akeo.ie/ and install the corresponding software.
After that, you will need to plug in the DRS4 to your computer. From there go to ‘Options’, and select ‘List all Devices’.
Finally, choose the DRS4 evaluation board from the list and press install driver and let it run. You should be fine after that.
Best,
Steven |
 Tue Feb 27 13:29:47 2018, Stefan Ritt, WIndows Connection problem with drs507 SOLVED Tue Feb 27 13:29:47 2018, Stefan Ritt, WIndows Connection problem with drs507 SOLVED
|
Dear Steven, many thanks for this information, this is very useful. I know of people having problems on Windows 10, maybe this will also help them.
Stefan
| Steven Block wrote: |
|
Hello All,
I too have been struggling with trying to get the drs4 (507) to work on my windows machine and I found it to be a problem with the libusb library. My solution is as follows and has worked on multiple PC's. I ran this solution after I first plugged in the drs4 and installed 507.
Go to http://zadig.akeo.ie/ and install the corresponding software.
After that, you will need to plug in the DRS4 to your computer. From there go to ‘Options’, and select ‘List all Devices’.
Finally, choose the DRS4 evaluation board from the list and press install driver and let it run. You should be fine after that.
Best,
Steven
|
|
|
Wed May 9 14:07:10 2018, Alec Shackleford, WIndows Connection problem with drs507 SOLVED
|
Thank you for this fantastic solution. I had almost reinstalled windows 7 to see if that would solve the issue!
All the best,
Alec
| Stefan Ritt wrote: |
|
Dear Steven, many thanks for this information, this is very useful. I know of people having problems on Windows 10, maybe this will also help them.
Stefan
| Steven Block wrote: |
|
Hello All,
I too have been struggling with trying to get the drs4 (507) to work on my windows machine and I found it to be a problem with the libusb library. My solution is as follows and has worked on multiple PC's. I ran this solution after I first plugged in the drs4 and installed 507.
Go to http://zadig.akeo.ie/ and install the corresponding software.
After that, you will need to plug in the DRS4 to your computer. From there go to ‘Options’, and select ‘List all Devices’.
Finally, choose the DRS4 evaluation board from the list and press install driver and let it run. You should be fine after that.
Best,
Steven
|
|
|
|
Mon May 14 09:21:29 2018, Alessio Berti, WIndows Connection problem with drs507 SOLVED
|
Hi,
I have a machine with Windows 10 and the solution provided by Steven works fine. To give more details, the driver installed in my case is WinUSB (i.e. libusb, v6.1.7600.16385).
Cheers,
Alessio
| Alec Shackleford wrote: |
|
Thank you for this fantastic solution. I had almost reinstalled windows 7 to see if that would solve the issue!
All the best,
Alec
| Stefan Ritt wrote: |
|
Dear Steven, many thanks for this information, this is very useful. I know of people having problems on Windows 10, maybe this will also help them.
Stefan
| Steven Block wrote: |
|
Hello All,
I too have been struggling with trying to get the drs4 (507) to work on my windows machine and I found it to be a problem with the libusb library. My solution is as follows and has worked on multiple PC's. I ran this solution after I first plugged in the drs4 and installed 507.
Go to http://zadig.akeo.ie/ and install the corresponding software.
After that, you will need to plug in the DRS4 to your computer. From there go to ‘Options’, and select ‘List all Devices’.
Finally, choose the DRS4 evaluation board from the list and press install driver and let it run. You should be fine after that.
Best,
Steven
|
|
|
|
Thu Jun 7 16:27:21 2018, Phan Van Chuan, 
|
Dear Stefan,
I am using an DRS4 board to test the signal from an scintillator detector; It has connected well to the computer on DRS Oscilloscope (Figure 1). Now, I am having a problem of developing from the code of the drs_exam program, because the DRS4 board has not connected to the computer when translation the drs_exam program (Figure 2). Before running the drs_exam program, I copied the libusb-1.0.lib file to the computer's "C: \ Program Files \ Microsoft SDKs \ Windows \ v7.0A \ Lib" folder. Can you show me how to solve this problem?
Figure 1.
Figure 2.
Thank you very much!
Best Regards,
Chuan |
|
Fri Jun 8 08:11:05 2018, Stefan Ritt,
|
Several people reported this problem, but we cannot reproduce it at our lab. Both the oscilloscope and the command line interface use exactly the same code to connect to the board. Have you tried the solution reported here: elog:657 ?
Best,
Stefan
| Phan Van Chuan wrote: |
|
Dear Stefan,
I am using an DRS4 board to test the signal from an scintillator detector; It has connected well to the computer on DRS Oscilloscope (Figure 1). Now, I am having a problem of developing from the code of the drs_exam program, because the DRS4 board has not connected to the computer when translation the drs_exam program (Figure 2). Before running the drs_exam program, I copied the libusb-1.0.lib file to the computer's "C: \ Program Files \ Microsoft SDKs \ Windows \ v7.0A \ Lib" folder. Can you show me how to solve this problem?
Figure 1.
Figure 2.
Thank you very much!
Best Regards,
Chuan
|
|
|
Wed Jun 13 13:23:17 2018, Julian Kemp, Maximum analog input voltage
|
Dear all,
I have been wondering what the maximum analog input voltage for the DRS4 V5 evaluation board is. It came with a sticker indicating that it is "2.5V pk Max". On the other hand, when checking the manual (https://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf), it says maximum allowed is 10V DC or even 30V for short pulses. I foresee an application where I cannot make sure that pulses stay below 2.5V, so the correct value will be quite important for me.
Best,
Julian |
|
Wed Jun 13 13:42:47 2018, Stefan Ritt, Maximum analog input voltage
|
In principle the numbers in the manual are correct. But they relate to pulses of a certain length, because the input protection only works for DC voltage and for pulses which are not too long. Since we could not write this all on the label of the board, we decided to put there 100% safe value as a "warning" to people, meaning that if pulses are above 2.5V, they should look into the manual and read the details.
Stefan
| Julian Kemp wrote: |
|
Dear all,
I have been wondering what the maximum analog input voltage for the DRS4 V5 evaluation board is. It came with a sticker indicating that it is "2.5V pk Max". On the other hand, when checking the manual (https://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf), it says maximum allowed is 10V DC or even 30V for short pulses. I foresee an application where I cannot make sure that pulses stay below 2.5V, so the correct value will be quite important for me.
Best,
Julian
|
|
|
Wed Jun 13 16:34:28 2018, Julian Kemp, Maximum analog input voltage
|
Thank you! That solves my problem.
| Stefan Ritt wrote: |
|
In principle the numbers in the manual are correct. But they relate to pulses of a certain length, because the input protection only works for DC voltage and for pulses which are not too long. Since we could not write this all on the label of the board, we decided to put there 100% safe value as a "warning" to people, meaning that if pulses are above 2.5V, they should look into the manual and read the details.
Stefan
| Julian Kemp wrote: |
|
Dear all,
I have been wondering what the maximum analog input voltage for the DRS4 V5 evaluation board is. It came with a sticker indicating that it is "2.5V pk Max". On the other hand, when checking the manual (https://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf), it says maximum allowed is 10V DC or even 30V for short pulses. I foresee an application where I cannot make sure that pulses stay below 2.5V, so the correct value will be quite important for me.
Best,
Julian
|
|
|
|
Tue Jun 19 06:42:23 2018, Phan Van Chuan, The data acquisition speed
|
Dear Stefan,
We are using an DRS4 board V5.1 for building a metering system for the scintillator detector by a Labview program. The program was built based on the functions in DRS.cpp and it reads data from channel 0 very well (Fig 1). Now, I am having a problem with the data acquisition from DRS4 board. The data acquisition speed on this program is only about 30-50 Acq / s, while using the DRS Oscilloscope that of about 300-400 Acq / s.
When the program was installed with fDominoMode = 0 and fDominoActive = 0, the data acquisition speed was about 300-400 Acq / s. However, the waveform is inaccurate.
I do not know if I installed the wrong function! Can you show me how to solve this problem?
In the Labview program, functions (corresponding to functions in DRS.cpp) are called with the following parameters:
InitFPGA();
SetMultiBuffer(0);
fROFS = 1.6; // differential input range -0.5V ... +0.5V
fRange = 0;
SetDAC(fDAC_ROFS_1, fROFS);
fCommonMode = 0.8; // 0.8V +- 0.5V inside NMOS range
SetDAC(fDAC_CALP, fCommonMode);
SetDAC(fDAC_CALN, fCommonMode);
SetDAC(fDAC_BIAS, 0.70);
/* set default number of channels per chip */
SetChannelConfig(0, fNumberOfReadoutChannels - 1, 8);
// set ADC clock phase
fADCClkPhase = 0;
fADCClkInvert = 0;
// default settings
fMultiBuffer = 0;
fNMultiBuffer = 0;
fDominoMode = 1;
fReadoutMode = 1;
fReadPointer = 0;
fTriggerEnable1 = 1;
fTriggerEnable2 = 0;
fTriggerSource = 0;
fTriggerDelay = 0;
fTriggerDelayNs = 0;
fSyncDelay = 0;
fNominalFrequency = 1;
fDominoActive = 1;
// load calibration from EEPROM
ReadCalibration();
...
SetDominoMode(fDominoMode);
SetReadoutMode(fReadoutMode);
EnableTrigger(fTriggerEnable1, fTriggerEnable2);
SetTriggerSource(fTriggerSource);
SetTriggerDelayPercent(0);
SetSyncDelay(fSyncDelay);
SetDominoActive(fDominoActive);
SetFrequency(fNominalFrequency, true);
SetInputRange(fRange);
SelectClockSource(0); // FPGA clock
// disable calibration signals
EnableAcal(0, 0);
SetCalibTiming(0, 0);
EnableTcal(0);
// got to idle state
Reinit();
////////
SetFrequency (1,false);
settranspmode (1);
setinputrange(0);
EnableTcal (0,-,-);
EnableTrigger(1, 0);
SetTriggerSource(0);
SetTriggerLevel(0);
SetTriggerPolarity(false);
SetTriggerDelayNs(512);
// in loop of read data from DRS4:
{
StartDomino();
while (b->IsBusy());
TransferWaves(0, 8);
GetTime(0, 0, b->GetTriggerCell(0), time_array[0]);
GetWave(0, 0, wave_array[0]);
}
Thank you very much!
Best Regards,
Chuan
|
|
Tue Jun 19 10:05:50 2018, Stefan Ritt, The data acquisition speed
|
How do you tigger the board? In your code below you start the board (StartDomino()) and then wait for a trigger. Setting the trigger level to zero (via SetTriggerLevel(0)) is certainly wrong. Please have a look at drs_exam.cpp in the distribution and use the same functions used there. If you want to trigger the board, you need some external pulser with high enough rate (more than 500 Hz or course). You can also "software" trigger the board with a call to SoftTrigger() just after StartDomino(). This is then like the "auto" trigger on an oscilloscope.
Stefan
| Phan Van Chuan wrote: |
|
Dear Stefan,
We are using an DRS4 board V5.1 for building a metering system for the scintillator detector by a Labview program. The program was built based on the functions in DRS.cpp and it reads data from channel 0 very well (Fig 1). Now, I am having a problem with the data acquisition from DRS4 board. The data acquisition speed on this program is only about 30-50 Acq / s, while using the DRS Oscilloscope that of about 300-400 Acq / s.
When the program was installed with fDominoMode = 0 and fDominoActive = 0, the data acquisition speed was about 300-400 Acq / s. However, the waveform is inaccurate.
I do not know if I installed the wrong function! Can you show me how to solve this problem?
In the Labview program, functions (corresponding to functions in DRS.cpp) are called with the following parameters:
InitFPGA();
SetMultiBuffer(0);
fROFS = 1.6; // differential input range -0.5V ... +0.5V
fRange = 0;
SetDAC(fDAC_ROFS_1, fROFS);
fCommonMode = 0.8; // 0.8V +- 0.5V inside NMOS range
SetDAC(fDAC_CALP, fCommonMode);
SetDAC(fDAC_CALN, fCommonMode);
SetDAC(fDAC_BIAS, 0.70);
/* set default number of channels per chip */
SetChannelConfig(0, fNumberOfReadoutChannels - 1, 8);
// set ADC clock phase
fADCClkPhase = 0;
fADCClkInvert = 0;
// default settings
fMultiBuffer = 0;
fNMultiBuffer = 0;
fDominoMode = 1;
fReadoutMode = 1;
fReadPointer = 0;
fTriggerEnable1 = 1;
fTriggerEnable2 = 0;
fTriggerSource = 0;
fTriggerDelay = 0;
fTriggerDelayNs = 0;
fSyncDelay = 0;
fNominalFrequency = 1;
fDominoActive = 1;
// load calibration from EEPROM
ReadCalibration();
...
SetDominoMode(fDominoMode);
SetReadoutMode(fReadoutMode);
EnableTrigger(fTriggerEnable1, fTriggerEnable2);
SetTriggerSource(fTriggerSource);
SetTriggerDelayPercent(0);
SetSyncDelay(fSyncDelay);
SetDominoActive(fDominoActive);
SetFrequency(fNominalFrequency, true);
SetInputRange(fRange);
SelectClockSource(0); // FPGA clock
// disable calibration signals
EnableAcal(0, 0);
SetCalibTiming(0, 0);
EnableTcal(0);
// got to idle state
Reinit();
////////
SetFrequency (1,false);
settranspmode (1);
setinputrange(0);
EnableTcal (0,-,-);
EnableTrigger(1, 0);
SetTriggerSource(0);
SetTriggerLevel(0);
SetTriggerPolarity(false);
SetTriggerDelayNs(512);
// in loop of read data from DRS4:
{
StartDomino();
while (b->IsBusy());
TransferWaves(0, 8);
GetTime(0, 0, b->GetTriggerCell(0), time_array[0]);
GetWave(0, 0, wave_array[0]);
}
Thank you very much!
Best Regards,
Chuan
|
|
|
Tue Jun 19 12:54:51 2018, Phan Van Chuan, The data acquisition speed
|
Thank Stefan Ritt, I added the SoftTrigger() just after StartDomino(), so now, The data acquisition speed the same speed as in the DRS oscilloscope. I have misunderstood the "auto" trigger on an oscilloscope as setting SetTriggerLevel (0).
Thank so much!
Phan Van Chuan
| Phan Van Chuan wrote: |
|
Dear Stefan,
We are using an DRS4 board V5.1 for building a metering system for the scintillator detector by a Labview program. The program was built based on the functions in DRS.cpp and it reads data from channel 0 very well (Fig 1). Now, I am having a problem with the data acquisition from DRS4 board. The data acquisition speed on this program is only about 30-50 Acq / s, while using the DRS Oscilloscope that of about 300-400 Acq / s.
When the program was installed with fDominoMode = 0 and fDominoActive = 0, the data acquisition speed was about 300-400 Acq / s. However, the waveform is inaccurate.
I do not know if I installed the wrong function! Can you show me how to solve this problem?
In the Labview program, functions (corresponding to functions in DRS.cpp) are called with the following parameters:
InitFPGA();
SetMultiBuffer(0);
fROFS = 1.6; // differential input range -0.5V ... +0.5V
fRange = 0;
SetDAC(fDAC_ROFS_1, fROFS);
fCommonMode = 0.8; // 0.8V +- 0.5V inside NMOS range
SetDAC(fDAC_CALP, fCommonMode);
SetDAC(fDAC_CALN, fCommonMode);
SetDAC(fDAC_BIAS, 0.70);
/* set default number of channels per chip */
SetChannelConfig(0, fNumberOfReadoutChannels - 1, 8);
// set ADC clock phase
fADCClkPhase = 0;
fADCClkInvert = 0;
// default settings
fMultiBuffer = 0;
fNMultiBuffer = 0;
fDominoMode = 1;
fReadoutMode = 1;
fReadPointer = 0;
fTriggerEnable1 = 1;
fTriggerEnable2 = 0;
fTriggerSource = 0;
fTriggerDelay = 0;
fTriggerDelayNs = 0;
fSyncDelay = 0;
fNominalFrequency = 1;
fDominoActive = 1;
// load calibration from EEPROM
ReadCalibration();
...
SetDominoMode(fDominoMode);
SetReadoutMode(fReadoutMode);
EnableTrigger(fTriggerEnable1, fTriggerEnable2);
SetTriggerSource(fTriggerSource);
SetTriggerDelayPercent(0);
SetSyncDelay(fSyncDelay);
SetDominoActive(fDominoActive);
SetFrequency(fNominalFrequency, true);
SetInputRange(fRange);
SelectClockSource(0); // FPGA clock
// disable calibration signals
EnableAcal(0, 0);
SetCalibTiming(0, 0);
EnableTcal(0);
// got to idle state
Reinit();
////////
SetFrequency (1,false);
settranspmode (1);
setinputrange(0);
EnableTcal (0,-,-);
EnableTrigger(1, 0);
SetTriggerSource(0);
SetTriggerLevel(0);
SetTriggerPolarity(false);
SetTriggerDelayNs(512);
// in loop of read data from DRS4:
{
StartDomino();
while (b->IsBusy());
TransferWaves(0, 8);
GetTime(0, 0, b->GetTriggerCell(0), time_array[0]);
GetWave(0, 0, wave_array[0]);
}
Thank you very much!
Best Regards,
Chuan
|
|
|
Thu Jun 28 19:55:45 2018, Woon-Seng Choong, Negative Bin Width
|
I am using a DRS4 Evaluation Board v5 and running the drsosc.exe version 5.06 on a Window 7 machine. I have performed the voltage and timing calibration.
With test pulses on channel 1 and 2, I collected binary data file with all 4 channels active sampling at 5GSPS.
Attached is a distribution of the bin_width vs. cell # for all the 4 channels. Note that there are few cells with bin_width < 10 ps.
Channel 1: bin_width[498] = -0.000348, bin_width[1010]= -0.000348
Channel 2: bin_width[498] = 0.007363
Channel 3: bin_width[498] = 0.007843
Channel 4: bin_width[498] = 0.005948
Is this normal? How can you get negative bin_width? What does negative bin_width means?
I have attached the binary data file for your verification.
|
|
Fri Jun 29 07:51:33 2018, Stefan Ritt, Negative Bin Width
|
Yes that's normal. A negative cell bin width means that the next cell N+1 samples the input signal before cell N. This can happen due to the signal routing on the DRS4 chip.
Stefan
| Woon-Seng Choong wrote: |
|
I am using a DRS4 Evaluation Board v5 and running the drsosc.exe version 5.06 on a Window 7 machine. I have performed the voltage and timing calibration.
With test pulses on channel 1 and 2, I collected binary data file with all 4 channels active sampling at 5GSPS.
Attached is a distribution of the bin_width vs. cell # for all the 4 channels. Note that there are few cells with bin_width < 10 ps.
Channel 1: bin_width[498] = -0.000348, bin_width[1010]= -0.000348
Channel 2: bin_width[498] = 0.007363
Channel 3: bin_width[498] = 0.007843
Channel 4: bin_width[498] = 0.005948
Is this normal? How can you get negative bin_width? What does negative bin_width means?
I have attached the binary data file for your verification.
|
|
|
Mon Jul 16 19:39:35 2018, Woon-Seng Choong, Effect of interpolation on timing
|
Using a test pulse split into two channels of the DRS4 Evaluation Board v5, I looked at the time resolution using a leading edge threshold. The voltage and timing calibration was performed. One method (1) is to linearly interpolate between two points of the raw waveform that is above and below the threshold (this is exactly the algorithm given in read_binary.c in the drs4 source distribution); and another (2) is to use a cubic spline interpolation of the raw waveform. The results I obtained are:
Method 1: dt = 1.298 ns +/- 7.22 ps
Method 2: dt = 1.293 ns +/- 15.48 ps
I am really puzzled why the time resolution of the spline interpolation is about a factor 2 worse than the simple linear interpolation. Has anyone studied the time resolution using similar or other interpolation methods?
|
|
Fri Jul 20 00:44:13 2018, Woon-Seng Choong, Effect of interpolation on timing
|
Just a follow-up update.
It turns out that I was using a cubic spline interpolation with smoothing. If I required the cubic spline to go through the sampled points, then I obtained similar time resolution as the simple linear interpolation.
| Woon-Seng Choong wrote: |
|
Using a test pulse split into two channels of the DRS4 Evaluation Board v5, I looked at the time resolution using a leading edge threshold. The voltage and timing calibration was performed. One method (1) is to linearly interpolate between two points of the raw waveform that is above and below the threshold (this is exactly the algorithm given in read_binary.c in the drs4 source distribution); and another (2) is to use a cubic spline interpolation of the raw waveform. The results I obtained are:
Method 1: dt = 1.298 ns +/- 7.22 ps
Method 2: dt = 1.293 ns +/- 15.48 ps
I am really puzzled why the time resolution of the spline interpolation is about a factor 2 worse than the simple linear interpolation. Has anyone studied the time resolution using similar or other interpolation methods?
|
|
|
Mon Aug 13 19:44:59 2018, Martin Petriska, Latch delay support
|
Hi,
https://forge.physik.rwth-aachen.de/projects/drs4-rwth
Not sure about their licensing, but is it possible to add latch delay support to official firmware ?
Best regards
Martin |
|
Tue Aug 14 06:10:49 2018, Stefan Ritt, Latch delay support
|
I put that on the wish list, but I won't have time for that in the next months.
Stefan
| Martin Petriska wrote: |
|
Hi,
https://forge.physik.rwth-aachen.de/projects/drs4-rwth
Not sure about their licensing, but is it possible to add latch delay support to official firmware ?
Best regards
Martin
|
|
|
Wed Aug 1 00:49:30 2018, Sean Quinn, Optimal readout speed
|
Dear DRS4 team,
On page 3 of the data sheet, Table 1. for readout speed a typical value of 10 MHz is specified, but in the comment column it notes optimal performance achieved at 33 MHz.
I see the V5.1 eval board runs at 16 MHz. I'd like to understand the rationale for this using speed, instead of 33 MHz. Is there an SNR issue for the ADC at the higher speed, even though this is optimal for the DRS4?
Very best,
Sean |
|
Tue Aug 21 14:36:44 2018, Stefan Ritt, Optimal readout speed
|
The analog output of the DRS4 chip needs some time to settle. In principle it need an infinite amout of time (exponential curve) to settle to 100% of the final value. So if we sample after a finite time, there is some error we do. Some of the error will be taken care of the voltage calibration, but there remains some residual error depending on the value of the previous sampling cell. So all sampling speeds 10 MHz, 16 MHz, 33 MHz are kind of rule of thumbs. In the end we run the evaluation board at 16 MHz to save a little bit of power (which is limited on an USB device). But I never made a careful study of noise-after-calibration vs. sampling speed. If you have some measurements, I'm happt to include it in the data sheet.
Stefan
| Sean Quinn wrote: |
|
Dear DRS4 team,
On page 3 of the data sheet, Table 1. for readout speed a typical value of 10 MHz is specified, but in the comment column it notes optimal performance achieved at 33 MHz.
I see the V5.1 eval board runs at 16 MHz. I'd like to understand the rationale for this using speed, instead of 33 MHz. Is there an SNR issue for the ADC at the higher speed, even though this is optimal for the DRS4?
Very best,
Sean
|
|
|
Thu May 17 13:29:34 2018, Stefan Ritt, "Symmetric spikes" fixed
|
Good news for all DRS4 users. After many years, I finally understand where the "symmetric spikes" come from and how to fix them.
The "symmetric spikes" are small spikes of 17-18mV, which randomly happen at 1-2 cells. They alwas come in groups of 2 in each channel, symmetric around sampling cell #512. See first attachment.
The reason for the spikes is the previous readout cycle. On each readout cycle, the "read bit" is clocked through all 1024 cells to switch one cell contents to the DRS4 output. At the end of the 1024 cycles, the read bit stays at its last position. The bit is carried by a metal line on the chip, which crosses all 9 channels (second attachment). This bit now influences the sampling cells below the metal line capacitively, so their contents is "pushed up" by a few mV, just like the ROFS offset does. Since the DRS sampling channels are in a snake layout, going 0-512 from left, then 512-1023 back again, the line crosses two cells in each channel, and thus the symmetric spikes.
Previously, there was a software solution for that. In the evaluation board software DRSOsc there is a button "Remove spikes" which tries to fix this in software. Although this works most of the time, it's annoying and not 100% safe. Like when the spike sits on top of a noise signal, it might not be recognized. Fixing this in hardware is however straight forwar. After the readout cycle ends, push the read bit out of the chip:
- Address the read shift register by applying 1011b to A3:A0
- Switch SRIN low
- Apply 1024 clock cycles to SRCLK
This shifts the bit out of the chip, so that the next event is not affected by the read bit. The third attachment show the effect of this. The "clear cycle" increases the readout time a little bit, but depending on the application this might be worth it.
Regards,
Stefan |
|
Mon Sep 3 11:17:26 2018, Martin Petriska, "Symmetric spikes" fixed
|
Hi,
Is it possible to fix it by FPGA changes? I see readout cycle (proc_drs_reedout) in drs4_eval(4)5_app.vhd, but not sure where to exactly put this three commands. Could you please attach app.vhd file for eval board with example how to fix ?
Regards,
Martin
| Stefan Ritt wrote: |
|
Good news for all DRS4 users. After many years, I finally understand where the "symmetric spikes" come from and how to fix them.
The "symmetric spikes" are small spikes of 17-18mV, which randomly happen at 1-2 cells. They alwas come in groups of 2 in each channel, symmetric around sampling cell #512. See first attachment.
The reason for the spikes is the previous readout cycle. On each readout cycle, the "read bit" is clocked through all 1024 cells to switch one cell contents to the DRS4 output. At the end of the 1024 cycles, the read bit stays at its last position. The bit is carried by a metal line on the chip, which crosses all 9 channels (second attachment). This bit now influences the sampling cells below the metal line capacitively, so their contents is "pushed up" by a few mV, just like the ROFS offset does. Since the DRS sampling channels are in a snake layout, going 0-512 from left, then 512-1023 back again, the line crosses two cells in each channel, and thus the symmetric spikes.
Previously, there was a software solution for that. In the evaluation board software DRSOsc there is a button "Remove spikes" which tries to fix this in software. Although this works most of the time, it's annoying and not 100% safe. Like when the spike sits on top of a noise signal, it might not be recognized. Fixing this in hardware is however straight forwar. After the readout cycle ends, push the read bit out of the chip:
- Address the read shift register by applying 1011b to A3:A0
- Switch SRIN low
- Apply 1024 clock cycles to SRCLK
This shifts the bit out of the chip, so that the next event is not affected by the read bit. The third attachment show the effect of this. The "clear cycle" increases the readout time a little bit, but depending on the application this might be worth it.
Regards,
Stefan
|
|
|
Tue Sep 4 13:04:30 2018, Stefan Ritt, "Symmetric spikes" fixed
|
Yes it's possible, but I have to find time for that. The software of the evaluation board takes care of the spikes ("remove spikes"), so I thought it's not so urgent to fix that in the FPGA (which takes me some time).
Stefan
| Martin Petriska wrote: |
|
Hi,
Is it possible to fix it by FPGA changes? I see readout cycle (proc_drs_reedout) in drs4_eval(4)5_app.vhd, but not sure where to exactly put this three commands. Could you please attach app.vhd file for eval board with example how to fix ?
Regards,
Martin
| Stefan Ritt wrote: |
|
Good news for all DRS4 users. After many years, I finally understand where the "symmetric spikes" come from and how to fix them.
The "symmetric spikes" are small spikes of 17-18mV, which randomly happen at 1-2 cells. They alwas come in groups of 2 in each channel, symmetric around sampling cell #512. See first attachment.
The reason for the spikes is the previous readout cycle. On each readout cycle, the "read bit" is clocked through all 1024 cells to switch one cell contents to the DRS4 output. At the end of the 1024 cycles, the read bit stays at its last position. The bit is carried by a metal line on the chip, which crosses all 9 channels (second attachment). This bit now influences the sampling cells below the metal line capacitively, so their contents is "pushed up" by a few mV, just like the ROFS offset does. Since the DRS sampling channels are in a snake layout, going 0-512 from left, then 512-1023 back again, the line crosses two cells in each channel, and thus the symmetric spikes.
Previously, there was a software solution for that. In the evaluation board software DRSOsc there is a button "Remove spikes" which tries to fix this in software. Although this works most of the time, it's annoying and not 100% safe. Like when the spike sits on top of a noise signal, it might not be recognized. Fixing this in hardware is however straight forwar. After the readout cycle ends, push the read bit out of the chip:
- Address the read shift register by applying 1011b to A3:A0
- Switch SRIN low
- Apply 1024 clock cycles to SRCLK
This shifts the bit out of the chip, so that the next event is not affected by the read bit. The third attachment show the effect of this. The "clear cycle" increases the readout time a little bit, but depending on the application this might be worth it.
Regards,
Stefan
|
|
|
|
Thu Sep 13 18:09:13 2018, Martin Petriska, "Symmetric spikes" fixed
|
Ok, so I made it ... and Yes it works :),
https://youtu.be/0noy4CoFoh8
here is changed part in drs4_eval4_app.vhd
when done =>
drs_readout_state <= spikeoff;
drs_stat_busy <= '0';
drs_dpram_we1 <= '0';
drs_write_set <= '1'; -- set drs_write_ff in proc_drs_write
-- to keep chip "warm"
-- spike fix ELOG 697
when spikeoff =>
o_drs_addr <= "1011"; -- Address the read shift register by applying 1011b to A3:A0
o_drs_srin <= '0'; -- Switch SRIN low
drs_readout_state <= spikecycle;
-- Apply 1024 clock cycles to SRCLK
drs_sr_count <= 0;
when spikecycle =>
drs_sr_count <= drs_sr_count + 1;
o_drs_srclk <= not o_drs_srclk;
if (drs_sr_count = 1024) then
drs_readout_state <= idle;
end if;
-- set-up of configuration register
| Stefan Ritt wrote: |
|
Yes it's possible, but I have to find time for that. The software of the evaluation board takes care of the spikes ("remove spikes"), so I thought it's not so urgent to fix that in the FPGA (which takes me some time).
Stefan
| Martin Petriska wrote: |
|
Hi,
Is it possible to fix it by FPGA changes? I see readout cycle (proc_drs_reedout) in drs4_eval(4)5_app.vhd, but not sure where to exactly put this three commands. Could you please attach app.vhd file for eval board with example how to fix ?
Regards,
Martin
| Stefan Ritt wrote: |
|
Good news for all DRS4 users. After many years, I finally understand where the "symmetric spikes" come from and how to fix them.
The "symmetric spikes" are small spikes of 17-18mV, which randomly happen at 1-2 cells. They alwas come in groups of 2 in each channel, symmetric around sampling cell #512. See first attachment.
The reason for the spikes is the previous readout cycle. On each readout cycle, the "read bit" is clocked through all 1024 cells to switch one cell contents to the DRS4 output. At the end of the 1024 cycles, the read bit stays at its last position. The bit is carried by a metal line on the chip, which crosses all 9 channels (second attachment). This bit now influences the sampling cells below the metal line capacitively, so their contents is "pushed up" by a few mV, just like the ROFS offset does. Since the DRS sampling channels are in a snake layout, going 0-512 from left, then 512-1023 back again, the line crosses two cells in each channel, and thus the symmetric spikes.
Previously, there was a software solution for that. In the evaluation board software DRSOsc there is a button "Remove spikes" which tries to fix this in software. Although this works most of the time, it's annoying and not 100% safe. Like when the spike sits on top of a noise signal, it might not be recognized. Fixing this in hardware is however straight forwar. After the readout cycle ends, push the read bit out of the chip:
- Address the read shift register by applying 1011b to A3:A0
- Switch SRIN low
- Apply 1024 clock cycles to SRCLK
This shifts the bit out of the chip, so that the next event is not affected by the read bit. The third attachment show the effect of this. The "clear cycle" increases the readout time a little bit, but depending on the application this might be worth it.
Regards,
Stefan
|
|
|
|
|
Sun Sep 23 02:22:46 2018, Gerard Arino-Estrada, Trigger OUT pulse width variable from 100 us up to 100 ms
|
Hello Stefan,
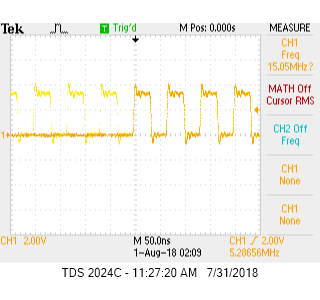
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard |
|
Wed Sep 26 14:44:14 2018, Stefan Ritt, Trigger OUT pulse width variable from 100 us up to 100 ms
|
The "Trigger OUT" has changed recently. It goes high on a new trigger, but then STAYS high until the board has been read out by the PC and re-started. This allows better synchronization with some external trigger, which can be re-armed with the falling edge of the trigger out signal. The signal can be quite long, since readout of an event via USB typically takes 2 ms, but can be more if the PC is busy. If you need back your 150 ns pulse, send the trigger out to an external pulse shaper with fixed shaping width.
Stefan
| Gerard Arino-Estrada wrote: |
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard
|
|
|
Wed Sep 26 18:28:20 2018, Gerard Arino-Estrada, Trigger OUT pulse width variable from 100 us up to 100 ms
|
Thank you very much for the answer, I really appreciate your help.
Thanks!
Gerard
| Stefan Ritt wrote: |
|
The "Trigger OUT" has changed recently. It goes high on a new trigger, but then STAYS high until the board has been read out by the PC and re-started. This allows better synchronization with some external trigger, which can be re-armed with the falling edge of the trigger out signal. The signal can be quite long, since readout of an event via USB typically takes 2 ms, but can be more if the PC is busy. If you need back your 150 ns pulse, send the trigger out to an external pulse shaper with fixed shaping width.
Stefan
| Gerard Arino-Estrada wrote: |
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard
|
|
|
|
Wed Sep 26 19:21:03 2018, Stefan Ritt, Trigger OUT pulse width variable from 100 us up to 100 ms
|
In meantime I even updated the manual.
Stefan
| Gerard Arino-Estrada wrote: |
|
Thank you very much for the answer, I really appreciate your help.
Thanks!
Gerard
|
|
|
Mon Nov 5 17:17:08 2018, Sean Quinn, Pi attenuator on eval board inputs?
|
Dear DRS4 team,
I am curious about this part of the circuit:
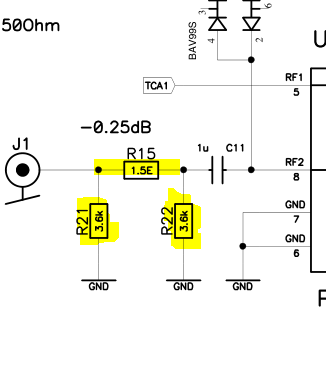
What is the purpose of this? |
|
Thu Nov 8 09:57:26 2018, Stefan Ritt, Pi attenuator on eval board inputs?
|
The attenuator compensates for the gain of the buffer which is slightly above one. In addition, it serves as a "placeholder" in case one wants larger input signals. One can easily convert the attenuator to -6db, -12db, etc. by chaning the resistors.
Stefan
| Sean Quinn wrote: |
|
Dear DRS4 team,
I am curious about this part of the circuit:
What is the purpose of this?
|
|
|
Thu Nov 8 11:44:35 2018, Davide Depaoli, Timing Issue
|
Hi,
We are using the DRS4 Evaluation Board as a digitizer in our laboratory.
We found a strange behavior in the saved files, more specifically the time difference between two consecutive points is not constant, also after the Timing Calibration.
As an example, I paste a piece of a xml file saved using the drsosc program, acquiring CH1 (open):
---------------------------
---[ START XML EXAMPLE ]---
---------------------------
<?xml version="1.0" encoding="ISO-8859-1"?>
<!-- created by MXML on Thu Nov 8 11:13:27 2018 -->
<DRSOSC>
<Event>
<Serial>1</Serial>
<Time>2018/11/08 11:13:27.163</Time>
<HUnit>ns</HUnit>
<VUnit>mV</VUnit>
<Board_2796>
<Trigger_Cell>216</Trigger_Cell>
<Scaler0>0</Scaler0>
<CHN1>
<Data>0.000,-1.0</Data>
<Data>1.083,-1.0</Data>
<Data>2.143,-1.0</Data>
<Data>2.926,-1.0</Data>
<Data>4.249,-0.1</Data>
<Data>4.929,-0.6</Data>
<Data>6.075,-0.4</Data>
<Data>7.042,0.0</Data>
<Data>8.299,0.2</Data>
[...]
-------------------------
---[ END XML EXAMPLE ]---
-------------------------
We found the same behavior saving events in the binary format, and then reading them with the read_binary.cpp
Is there a way to fix our issue?
Thanks a lot
Davide and Alessio |
|
Thu Nov 8 11:54:33 2018, Stefan Ritt, Timing Issue
|
That's not a bug, but a feature of the DRS4 chip. The time bins have different values by the properties of the chip. They are generated by a chain of inverters, which all have different propagation times. This delay is measured by the time calibration and then applied. If you want equidistant bins,
you have to interpolate your data points (linearly or by splines) and resample the signal. You can find more details in the DRS4 data sheet.
Best,
Stefan
> Hi,
>
> We are using the DRS4 Evaluation Board as a digitizer in our laboratory.
> We found a strange behavior in the saved files, more specifically the time difference between two consecutive points is not constant, also after the Timing Calibration.
> As an example, I paste a piece of a xml file saved using the drsosc program, acquiring CH1 (open):
>
> ---------------------------
> ---[ START XML EXAMPLE ]---
> ---------------------------
>
> <?xml version="1.0" encoding="ISO-8859-1"?>
> <!-- created by MXML on Thu Nov 8 11:13:27 2018 -->
> <DRSOSC>
> <Event>
> <Serial>1</Serial>
> <Time>2018/11/08 11:13:27.163</Time>
> <HUnit>ns</HUnit>
> <VUnit>mV</VUnit>
> <Board_2796>
> <Trigger_Cell>216</Trigger_Cell>
> <Scaler0>0</Scaler0>
> <CHN1>
> <Data>0.000,-1.0</Data>
> <Data>1.083,-1.0</Data>
> <Data>2.143,-1.0</Data>
> <Data>2.926,-1.0</Data>
> <Data>4.249,-0.1</Data>
> <Data>4.929,-0.6</Data>
> <Data>6.075,-0.4</Data>
> <Data>7.042,0.0</Data>
> <Data>8.299,0.2</Data>
>
> [...]
>
> -------------------------
> ---[ END XML EXAMPLE ]---
> -------------------------
>
> We found the same behavior saving events in the binary format, and then reading them with the read_binary.cpp
>
> Is there a way to fix our issue?
>
> Thanks a lot
>
> Davide and Alessio |
|
Thu Nov 8 12:02:34 2018, Davide Depaoli, Timing Issue
|
Thanks a lot for the quick response.
We will do as you suggest.
Best regards
Davide and Alessio
> That's not a bug, but a feature of the DRS4 chip. The time bins have different values by the properties of the chip. They are generated by a chain of inverters, which all have different
propagation times. This delay is measured by the time calibration and then applied. If you want equidistant bins,
> you have to interpolate your data points (linearly or by splines) and resample the signal. You can find more details in the DRS4 data sheet.
>
> Best,
> Stefan
>
>
> > Hi,
> >
> > We are using the DRS4 Evaluation Board as a digitizer in our laboratory.
> > We found a strange behavior in the saved files, more specifically the time difference between two consecutive points is not constant, also after the Timing Calibration.
> > As an example, I paste a piece of a xml file saved using the drsosc program, acquiring CH1 (open):
> >
> > ---------------------------
> > ---[ START XML EXAMPLE ]---
> > ---------------------------
> >
> > <?xml version="1.0" encoding="ISO-8859-1"?>
> > <!-- created by MXML on Thu Nov 8 11:13:27 2018 -->
> > <DRSOSC>
> > <Event>
> > <Serial>1</Serial>
> > <Time>2018/11/08 11:13:27.163</Time>
> > <HUnit>ns</HUnit>
> > <VUnit>mV</VUnit>
> > <Board_2796>
> > <Trigger_Cell>216</Trigger_Cell>
> > <Scaler0>0</Scaler0>
> > <CHN1>
> > <Data>0.000,-1.0</Data>
> > <Data>1.083,-1.0</Data>
> > <Data>2.143,-1.0</Data>
> > <Data>2.926,-1.0</Data>
> > <Data>4.249,-0.1</Data>
> > <Data>4.929,-0.6</Data>
> > <Data>6.075,-0.4</Data>
> > <Data>7.042,0.0</Data>
> > <Data>8.299,0.2</Data>
> >
> > [...]
> >
> > -------------------------
> > ---[ END XML EXAMPLE ]---
> > -------------------------
> >
> > We found the same behavior saving events in the binary format, and then reading them with the read_binary.cpp
> >
> > Is there a way to fix our issue?
> >
> > Thanks a lot
> >
> > Davide and Alessio |
|
Wed Jan 30 06:51:37 2019, Saurabh Neema, DRS4 domino wave stability study
|
We have been using DRS4 IC in our design for quite some time and it is giving good performance.
Till now we were using Domino wave frequency as 1 GSPS by use of reference clock to DRS4 and internal PLL of DRS4. Recently we tried to use 4GSPS by modifying the reference clock.
What I have found that DRS4 domino wave is more stable at 4 GSPS as compared to 1 GSPS by doing the timing jitter analysis. I am not sure if it is the property of DRS4 IC to be having more stable domino wave at higher frequency (by design) or it is due to some external effects like PLL loop filter or any other on board parasitic effects.
Please share if anyone has done any study of DRS4 Domino wave stability at different sampling frequencies.
Thanks,
|
|
Wed Jan 30 08:02:25 2019, Stefan Ritt, DRS4 domino wave stability study
|
The Domino wave is most stable at 5 GSPS, slowly degrades down to 3-2 GSPS, and at 1GSPS gets some significant jitter. This is for internal reasons in the chip and cannot be compensated by the loop filter. It is therefore important to run it as fast as possible if you want to achieve best timing resolution. As a rule of thumb, the jitter at 5 GSPS is about 20-25 ps, and at 1 GSPS it is maybe 150 ps. If you require good timing resolution, you can use the 9th channel to sample a stable reference clock (100 MHz for example) and measure timing relative to that clock. This way you can bring down the resolution to a few ps at 5GSPS and to maybe 40 ps at 1 GSPS.
Stefan
| Saurabh Neema wrote: |
|
We have been using DRS4 IC in our design for quite some time and it is giving good performance.
Till now we were using Domino wave frequency as 1 GSPS by use of reference clock to DRS4 and internal PLL of DRS4. Recently we tried to use 4GSPS by modifying the reference clock.
What I have found that DRS4 domino wave is more stable at 4 GSPS as compared to 1 GSPS by doing the timing jitter analysis. I am not sure if it is the property of DRS4 IC to be having more stable domino wave at higher frequency (by design) or it is due to some external effects like PLL loop filter or any other on board parasitic effects.
Please share if anyone has done any study of DRS4 Domino wave stability at different sampling frequencies.
Thanks,
|
|
|
Tue Jan 29 14:43:44 2019, Abaz Kryemadhi, ROOT Macro for data acquired with the newest software
|
Hello,
Is there a root macro for decoding binary data acquired with the newest software for single board or multi-boards daisy chained?
Cheers,
Abaz |
|
Wed Jan 30 17:08:58 2019, Stefan Ritt, ROOT Macro for data acquired with the newest software
|
This one elog:361 should still work.
Stefan
| Abaz Kryemadhi wrote: |
|
Hello,
Is there a root macro for decoding binary data acquired with the newest software for single board or multi-boards daisy chained?
Cheers,
Abaz
|
|
|
Sat Feb 2 00:13:12 2019, Hans Steiger, Saving Rate (only 15Acq/s)
|
Dear All,
when I use my Evaluation Board with some PMTs I can digitize 450 Acq/s or so. But when I want to save the waveforms the rate goes down. The Acqu. rate with saving is in the range of 14Hz up to 24 Hz.
I normally use the .txt file. I try to use the 5GS/s but also with much lower sampling rate the saving rate is not getting much better.
Is this a problem of my McBook connected to the Evaluation Board?
All the best,
Hans |
|
Sat Feb 2 10:10:22 2019, Stefan Ritt, Saving Rate (only 15Acq/s)
|
The reduction of rate is because you save in XML format, which is an ASCII format, so human readable, but takes long to write. If you switch to binary format and write on a decent fast hard disk, you should get back to 450 Acq/s.
Stefan
| Hans Steiger wrote: |
|
Dear All,
when I use my Evaluation Board with some PMTs I can digitize 450 Acq/s or so. But when I want to save the waveforms the rate goes down. The Acqu. rate with saving is in the range of 14Hz up to 24 Hz.
I normally use the .txt file. I try to use the 5GS/s but also with much lower sampling rate the saving rate is not getting much better.
Is this a problem of my McBook connected to the Evaluation Board?
All the best,
Hans
|
|
|
Mon Feb 4 16:42:08 2019, Hans Steiger, Different Distances between the sampling points
|
Dear All,
with the older software for my V5 Board i did not have the problem, that the distance between the sampling points (in time) is not the same (e.g. a sampling point all 200ps for 5GS/s).
How can i fix this?
Can someone provide me the software for the board which is old enough to not have this problem. All my Root interpreters produce problems with this new data format. Which version would be old enough?
All the best and thanks a lot,
Hans |
|
Mon Feb 4 16:46:04 2019, Stefan Ritt, Different Distances between the sampling points
|
The sampling points are NOT equidestant, they have varying bin widths of 150ps to 250ps at 5GS/s. That's due the way the DRS4 chip works. You might have neglected that fact in the past, but that would have led to poor timing resolutions (typically 1-2ns resolution only). To get bins with the same width, you have to treat your waveform as a real X/Y points (or better U/T), and the re-sample that cure, maybe spline-interpolated, at 200ps bins.
Stefan
| Hans Steiger wrote: |
|
Dear All,
with the older software for my V5 Board i did not have the problem, that the distance between the sampling points (in time) is not the same (e.g. a sampling point all 200ps for 5GS/s).
How can i fix this?
Can someone provide me the software for the board which is old enough to not have this problem. All my Root interpreters produce problems with this new data format. Which version would be old enough?
All the best and thanks a lot,
Hans
|
|
|
Mon Feb 4 17:36:49 2019, Hans Steiger, Different Distances between the sampling points
|
Sorry.... but is there a solution or a Root Macro, that reads the waveforms into a Root-Tree? I simply can not work anymore with the data.
Can you tell me, which software was in use in early 2017?
All the best,
Hans
| Stefan Ritt wrote: |
|
The sampling points are NOT equidestant, they have varying bin widths of 150ps to 250ps at 5GS/s. That's due the way the DRS4 chip works. You might have neglected that fact in the past, but that would have led to poor timing resolutions (typically 1-2ns resolution only). To get bins with the same width, you have to treat your waveform as a real X/Y points (or better U/T), and the re-sample that cure, maybe spline-interpolated, at 200ps bins.
Stefan
| Hans Steiger wrote: |
|
Dear All,
with the older software for my V5 Board i did not have the problem, that the distance between the sampling points (in time) is not the same (e.g. a sampling point all 200ps for 5GS/s).
How can i fix this?
Can someone provide me the software for the board which is old enough to not have this problem. All my Root interpreters produce problems with this new data format. Which version would be old enough?
All the best and thanks a lot,
Hans
|
|
|
|
Mon Feb 4 18:18:22 2019, Stefan Ritt, Different Distances between the sampling points
|
elog:361
| Hans Steiger wrote: |
|
Sorry.... but is there a solution or a Root Macro, that reads the waveforms into a Root-Tree? I simply can not work anymore with the data.
Can you tell me, which software was in use in early 2017?
All the best,
Hans
| Stefan Ritt wrote: |
|
The sampling points are NOT equidestant, they have varying bin widths of 150ps to 250ps at 5GS/s. That's due the way the DRS4 chip works. You might have neglected that fact in the past, but that would have led to poor timing resolutions (typically 1-2ns resolution only). To get bins with the same width, you have to treat your waveform as a real X/Y points (or better U/T), and the re-sample that cure, maybe spline-interpolated, at 200ps bins.
Stefan
| Hans Steiger wrote: |
|
Dear All,
with the older software for my V5 Board i did not have the problem, that the distance between the sampling points (in time) is not the same (e.g. a sampling point all 200ps for 5GS/s).
How can i fix this?
Can someone provide me the software for the board which is old enough to not have this problem. All my Root interpreters produce problems with this new data format. Which version would be old enough?
All the best and thanks a lot,
Hans
|
|
|
|
|
Wed Mar 6 10:09:01 2019, Willy Chang, drscl "no board found" in some Win7 or Win8.X PCs
|
Hi all,
When connecting the board and running the Zadig program, some Windows PCs may return "driver installation failed." I coudn't find the solution from their download website. So I started the drscl first. Apparently it shows: Successfully scanned, but no boards found. Therefore I checked the Device Manager. A breakdown warning triangle appears under the serial port...
The possible solution may be found here.
Infact, the WinUsb driver has been in existence in your PC. One can just follow the instructions here:
https://docs.microsoft.com/en-us/windows-hardware/drivers/usbcon/winusb-installation
- Plug in your device to the host system.
- Open Device Manager and locate the device.
- Right-click the device and select Update driver software... from the context menu.
- In the wizard, select Browse my computer for driver software.
- Select Let me pick from a list of device drivers on my computer.
- From the list of device classes, select Universal Serial Bus devices.
- The wizard displays WinUsb Device. Select it to load the driver.
In the wizard, somehow the default setting displays Microsoft Device on the Top of the list and replaced the WinUsb Device. You can easily re-load the WinUsb Device. Just ignore the WARNING from the device manager. The board should work fine now.
Willy |
|
Fri Mar 8 19:35:11 2019, Abaz Kryemadhi, ROOT Macro for newest software
|
The older root macro did not work for me for data acquired with the newest software.
so for the newest software and multiple boards, I modified the read_binary.cpp into read_binary.C for those who like to use the root macro, see the attachment.
|
|
Thu Mar 14 03:43:49 2019, Deepak Samuel, How to buy DRS evaluation kit
|
Dear Stefan,
I have emailed drs4@psi.ch a couple of times regarding the pricing of the evaluation kits for academic use in India and have not received any reply and hence writing in this forum. Could you please help me in this?
Thanks and regards,
Deepak Samuel. |
|
Fri Apr 12 09:39:30 2019, Lev Pavlov, multi-board
|
Good afternoon, I use 5 boards in multi-mode, everything is connected according to the instructions. Can I measure the phase difference between the two signals on channel 1 and channel 20? with each board the phase shift is added +16 ns I can not figure out how to compensate for this. give thanks |
|
Fri Apr 12 09:55:50 2019, Stefan Ritt, multi-board
|
Subtract 16 ns from your measured value ;-)
Stefan
| Lev Pavlov wrote: |
Good afternoon, I use 5 boards in multi-mode, everything is connected according to the instructions. Can I measure the phase difference between the two signals on channel 1 and channel 20? with each board the phase shift is added +16 ns I can not figure out how to compensate for this. give thanks
|
|
|
Fri Apr 12 09:59:15 2019, Lev Pavlov, multi-board
|
I understand this, thanks. But my Chief does not understand this, he wants to see the phase difference without “crutches”. And what is meant in the manual 50 ps resolution? Maybe I just do not understand something? And if you submit a reference signal not in the mode of a garland, but simultaneously in parallel to all the boards, will this shift go? Thanks
Lev Pavlov
| Stefan Ritt wrote: |
|
Subtract 16 ns from your measured value ;-)
Stefan
| Lev Pavlov wrote: |
Good afternoon, I use 5 boards in multi-mode, everything is connected according to the instructions. Can I measure the phase difference between the two signals on channel 1 and channel 20? with each board the phase shift is added +16 ns I can not figure out how to compensate for this. give thanks
|
|
|
|
Fri Apr 12 12:50:18 2019, Stefan Ritt, multi-board
|
If you have two signal going through two cables, the cable have never the same length (on a scale of picoseconds), and you have to calibrate that anyway. So a proper timing calibration is not a crutch.
What do you mean by "manual 50ps"? The manual does not mention any resolution. In my experience, you can achieve about 10ps between channels of the SAME board easily. The phase shift between boards in multi-mode is always there, unfortunately there are no cable which conduct current faster than the speed of light! What you can do is to split a common reference clock and send a copy to one channel of each board, then calculate the timing relative to the next edge in that reference signal. This way you get rid of the phase shift, but this is also a kind of calibration, so in your laguange that would be "a big crutch".
Stefan
| Lev Pavlov wrote: |
|
I understand this, thanks. But my Chief does not understand this, he wants to see the phase difference without “crutches”. And what is meant in the manual 50 ps resolution? Maybe I just do not understand something? And if you submit a reference signal not in the mode of a garland, but simultaneously in parallel to all the boards, will this shift go? Thanks
Lev Pavlov
| Stefan Ritt wrote: |
|
Subtract 16 ns from your measured value ;-)
Stefan
| Lev Pavlov wrote: |
Good afternoon, I use 5 boards in multi-mode, everything is connected according to the instructions. Can I measure the phase difference between the two signals on channel 1 and channel 20? with each board the phase shift is added +16 ns I can not figure out how to compensate for this. give thanks
|
|
|
|
|