| ID |
Date |
Author |
Subject |
|
21
|
Fri Oct 30 03:31:54 2009 |
Jinhong Wang | outline dimension of DRS4 | 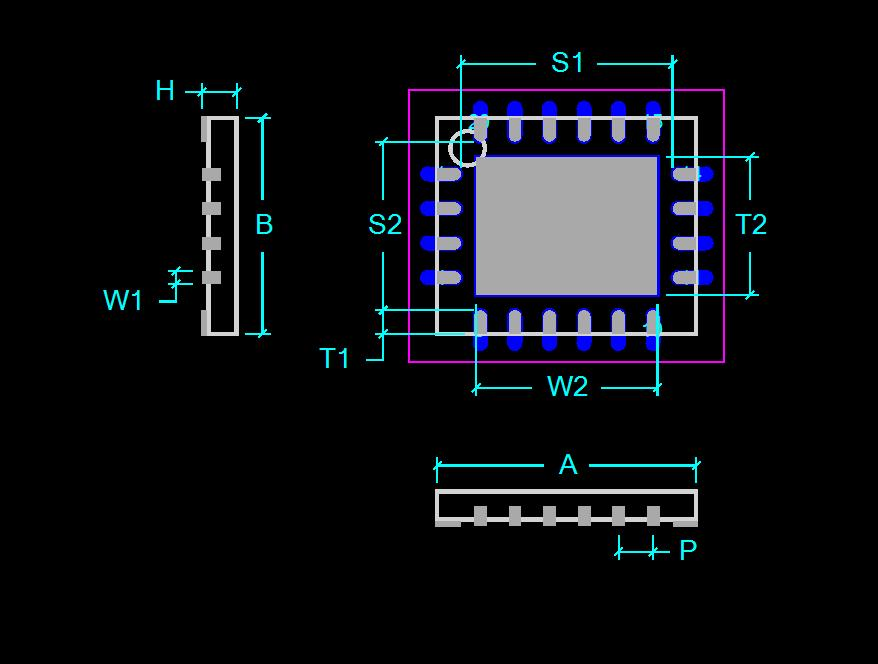
Fig.1 typical dimension of QFN package
Above is the typical dimension specification for QFN package. I cann't find the corresponding "T1" as in Fig.1 in the DRS4 documents, nor any of the tolerance of the dimensions, which are usually expressed in the form of a range between a min. value and a max. value.
So will you specify the dimension of "T1" and "W1", and the dimension tolerance of them?
Thanks and best wishes!
Jinhong Wang University of Science and Technology of China |
|
23
|
Mon Dec 14 10:14:16 2009 |
Jinhong Wang | Trigger of DRS4 | Dear Mr. S. Ritt
The following is my confusion about the trigger of DRS4. It mainly concertrates on the generation of trigger signal to stop DRS4 sampling process for readout of sampled waveform.
As metioned in the datasheet of DRS4, the chip samples the analog input every domino sampling period. After finished sampling a waveform, the sampling process can be stoped by lowering the DWRITE while keeping DENABLE high. But the analog input is asychronous to the Domino CLK. Then, how can we know when to stop the domino sampling process to read out the sampled waveform? Of course, a trigger can be used. But from my present knowledge of DRS4, trigger can only be generated from analog input. Analog input is splited into two channels, one to DRS4 analog input, the other to FPGA as the trigger. However, splitting analog inputs increases the system design complexity, and may lower the total performace. So what is your suggestion?
In our system, there are 8 analog inputs to a signal DRS4 chip, the outputs of DRS4 chip are connected to an 8-channel 14 bit ADC ( AD9252). It wold be kind of you to inform me about the most applicable approach for readout of DRS4 sampled wavefrom.
Best regards.
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn) |
|
25
|
Mon Dec 21 10:17:05 2009 |
Jinhong Wang | Trigger of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Dear Mr. S. Ritt
The following is my confusion about the trigger of DRS4. It mainly concertrates on the generation of trigger signal to stop DRS4 sampling process for readout of sampled waveform.
As metioned in the datasheet of DRS4, the chip samples the analog input every domino sampling period. After finished sampling a waveform, the sampling process can be stoped by lowering the DWRITE while keeping DENABLE high. But the analog input is asychronous to the Domino CLK. Then, how can we know when to stop the domino sampling process to read out the sampled waveform? Of course, a trigger can be used. But from my present knowledge of DRS4, trigger can only be generated from analog input. Analog input is splited into two channels, one to DRS4 analog input, the other to FPGA as the trigger. However, splitting analog inputs increases the system design complexity, and may lower the total performace. So what is your suggestion?
In our system, there are 8 analog inputs to a signal DRS4 chip, the outputs of DRS4 chip are connected to an 8-channel 14 bit ADC ( AD9252). It wold be kind of you to inform me about the most applicable approach for readout of DRS4 sampled wavefrom.
Best regards.
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn)
|
Indeed you have to make an external trigger. The evaluation board uses the "transparent mode" of the DRS4 to "mirror" the input signal at the output, then puts a comparator there. The schematics of the evaluation board is in the manual. This does then not degrate the analog performance. You can of course also split the signal at the input, this will only add a minor additional load to the input signal, since the load of the DRS4 chips itself is much bigger than that of any comparator.
An alternative is to turn on the transparent mode and continuously digitize all 8 outputs with your AD9252. Then you make the trigger purely digital in your FPGA. You can put there a comparator, or even more complex logic like multiplicity etc. Note however that this causes some latency, since the ADC has a pipeline which is quite long, so you have to buffer the latency of your trigger in the analog window of the DRS4 sampling cells. Like if you run the DRS4 at 1 GSPS, you can accomodate 1024 ns of sampling depth, which is good for maybe 500 ns of trigger latency plus 500 ns of the waveform of interest.
|
Thank you. The transparent mode can be really helpful. Can you provide me in more details of the chip's transparent mode? I am still confused about the following aspects.
I notice that DRS4 samples the analog wave in the way "clear before write", and in the transparent mode, there will be certain delay before the trigger logic stops the sampling process. So,does it mean that the waveform recording process per Domino sampling cycle will not degrade the amplitude of the analog signal? Hence, for two idential analog inputs, one with a trigger latency of 500 ns and the other of 510 ns, the sampled waveform is identical, what differs is the starting number of the first active sampling cell, where the reading process considered to be started. Is that right? Looking forward to your insight.
Best regrads.
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn) |
|
27
|
Tue Dec 22 01:30:55 2009 |
Jinhong Wang | Trigger of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Dear Mr. S. Ritt
The following is my confusion about the trigger of DRS4. It mainly concertrates on the generation of trigger signal to stop DRS4 sampling process for readout of sampled waveform.
As metioned in the datasheet of DRS4, the chip samples the analog input every domino sampling period. After finished sampling a waveform, the sampling process can be stoped by lowering the DWRITE while keeping DENABLE high. But the analog input is asychronous to the Domino CLK. Then, how can we know when to stop the domino sampling process to read out the sampled waveform? Of course, a trigger can be used. But from my present knowledge of DRS4, trigger can only be generated from analog input. Analog input is splited into two channels, one to DRS4 analog input, the other to FPGA as the trigger. However, splitting analog inputs increases the system design complexity, and may lower the total performace. So what is your suggestion?
In our system, there are 8 analog inputs to a signal DRS4 chip, the outputs of DRS4 chip are connected to an 8-channel 14 bit ADC ( AD9252). It wold be kind of you to inform me about the most applicable approach for readout of DRS4 sampled wavefrom.
Best regards.
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn)
|
Indeed you have to make an external trigger. The evaluation board uses the "transparent mode" of the DRS4 to "mirror" the input signal at the output, then puts a comparator there. The schematics of the evaluation board is in the manual. This does then not degrate the analog performance. You can of course also split the signal at the input, this will only add a minor additional load to the input signal, since the load of the DRS4 chips itself is much bigger than that of any comparator.
An alternative is to turn on the transparent mode and continuously digitize all 8 outputs with your AD9252. Then you make the trigger purely digital in your FPGA. You can put there a comparator, or even more complex logic like multiplicity etc. Note however that this causes some latency, since the ADC has a pipeline which is quite long, so you have to buffer the latency of your trigger in the analog window of the DRS4 sampling cells. Like if you run the DRS4 at 1 GSPS, you can accomodate 1024 ns of sampling depth, which is good for maybe 500 ns of trigger latency plus 500 ns of the waveform of interest.
|
Thank you. The transparent mode can be really helpful. Can you provide me in more details of the chip's transparent mode? I am still confused about the following aspects.
I notice that DRS4 samples the analog wave in the way "clear before write", and in the transparent mode, there will be certain delay before the trigger logic stops the sampling process. So,does it mean that the waveform recording process per Domino sampling cycle will not degrade the amplitude of the analog signal? Hence, for two idential analog inputs, one with a trigger latency of 500 ns and the other of 510 ns, the sampled waveform is identical, what differs is the starting number of the first active sampling cell, where the reading process considered to be started. Is that right? Looking forward to your insight.
Best regrads.
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn)
|
The amplitude of the analog signal is not degraded by the transparent mode, since the signal is buffered on the chip, and the output of this buffer is send off the chip. The waveform digitizing of course requires quite some current to charge up all capacitors, so there is maximum current of ~1mA for 5 GSPS. If you only have a weak signal source, your bandwidth might be limited by that. On the evaluation board for example we use passive transformers to produce the differential input signal from a single-ended signal. Although the transformers are rated 1 GHz Bandwidth, we only achieve 200 MHz with the passive transformers. By using active high speed differential drivers, you can get about 700 MHz right now.
If you have two channels with 500 ns and 510 ns trigger latency, there is no difference in the "domino stop position" since there is only one domino circuit per chip which can be stopped. So the stop position is the same for all eight channels on a chip.
|
So you mean there is an analog buffer per channel? The analog signal is buffered there, before entering the sampling cells? Then, when will the buffer content be released and cleared? How shall I handle "Dwite" and "Denable" during a complete operation when an analog signal arrives in the transparent mode? I cannot find more information beyond the datasheet, a detailed description of the transparent mode (and the analog buffer, if possible) will be really helpful for me.
Best,
Sincerely,
Jinhong Wang (wangjinh@mail.ustc.edu.cn) |
|
78
|
Wed May 12 11:47:39 2010 |
Jinhong Wang | DRS4 chip model |
| Stefan Ritt wrote: |
|
| Ignacio Diéguez Estremera wrote: |
|
So i guess i won't be able to include drs4 in my simulations :-(. Any other suggestions? Maybe the S-params model you where working on? Anything is better than nothing :-)
|
Please find attached the S-parameters.
|
Hi, we plan to do a time interpolating among the eight channels on a single chip to obtain a maximum 40 GSPS (or, maybe 30 GSPS ) sampling rate. Hence RF behavior of the anlog input is very important for us.
Will you give us some advice on the modeling of the anlog input circuit of the chip? Perhaps just the Spice model of the analog input?
The attached S parameters I found here is for fs =1 GSPS, what about fs=5GSPS?
thanks in advance,
Jinhong Wang (wangjinh@mail.ustc.edu.cn ; alleyor.wang@gmail.com) |
|
91
|
Fri Jun 18 11:31:20 2010 |
Jinhong Wang | DVDD Problem of DRS 4 |
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
Hi Stefan,
on our board some DRS chips draw a lot of current through DVDD after power-up and heat up significantly--it is true that our board doesn't have weak pull-down resistors at DENABLE and DWRITE output pins of FPGA, so this problem might have been caused by that, but a reinitialization of the Domino circuit doesn't help either. We tried different capacitors at DVDD and it seemed the larger the capacitance, the better the result--with a capacitor larger than 10nF some of the DRS chips could work happily in the normal way while if the capacitor is only 4.7nF all of them got very hot. Would you please provide some suggestions why there should be such a problem?
Thanks a lot!
|
I found that sometimes even a reinitialization fails if the pull-down resistors are missing. So instead playing with capacitors at DVDD, I would just solder two resistors on the board which should fix the problem completely.
|
Thanks! After adding pull-down resistors the voltages come back to normal.
However there is another weird problem that arises: a reset pulse seems unable to set the internal shift registers to default values. For example, after reset without addressing the Config Register the PLL will not try to lock with external reference clock. Even if I explicitly address the Config Register after reset and have the PLL locked, some channels of the chip will give null output during readout while other channels work normally. Could it be that some channels are not initiated properly with the Domino circuit?
|
Something is wrong. I have 800 chips, and they all start up fine. Check with your scope the RESET, DSPEED, DENABLE and DTAP signals. When RESET is applied, DSPEED should go to 2.5 V. When DENABLE goes high, the domino wave is started and you should see DTAP toggle. DSPEED is then lowered by the PLL until DTAP matches your external reference clock. I usually keep DENABLE high all the time after initialization, so the domino wave just continues running.
Another problem could however be the chip readout. If some channel gives null output, it could be that your readout has a problem. Do you use RSRLOAD to initialize the readout sequence?
|
Yes; I used RSRLOAD to trigger readout of all channels in parallel so the asymmetry between channels of the same chip is really a big puzzle. Also during reset DSPEED indeed goes to 2.5V, but after reset the PLL will not try to lock with the external reference clock and lower DSPEED. Instead the Domino circuit just oscillates at the highest frequency by itself.
A more confusing discovery is that the SRIN level before starting the Domino wave could affect the behavior of the PLL. I mean the level of SRIN when the chip is at A="1111" or "1010". Is SRIN supposed to influence the chip even in these standby or transparent modes?
|
Just some ideas:
- Is DENABLE really kept high all the time?
- Is DRESET only applied once during initialization, after that it should stay high
- Does REFCLK+/REFCLK- really toggle at the required sampling speed / 2048?
- Is the REFCLK really a good differential signal? Note that it must be biased properly since the DRS4 inputs are high impedance
- Is the Bit1 in the Config Register really at "1" to enable the PLL?
The only way the SRIN level could affect the PLL is if you address the Config Register (A="1100") and you clock in a few bits with SRCLK.
Have you thought about 'crazy' things such as:
- Defining the DRS4 chip wronly in your CAD software so that the pins are different from what you think?
- Some soldering problem of the DRS4 chips (we had this in the past) so that some pins are not connected at all and others have shorts
I guess you checked most of the things, so I'm just wildly guessing in order to stimulate some thoughts.
The ultimate check would be to get one of the evaluation boards (I sent a few to Jean-Francois Genat some time ago...) and compare the DRS4 signals pin by pin.
|
Hi Stefan
I designed the evaluation board for our experiment. On our boards, I encountered the similar problem when working on the PLL of DRS4. I compared the following two configuration process, which on with PLL locked, the other not,
Process1:
step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set DEnable high, thus do nothing but wait
I found DRS4 PLL working and locked.
Process 2:
Step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set Config. Register( "11111111" .of course, this step was not necessary, just to see whether SPI was working properly from DTAP when set to "11111110")
Step4: Set The read shift Register ( full read out mode)
Step5: Set DEnable high,
Step6: Set DWrite high , thus low it , and prepare to read the waveform.
Well, I found in this case, the PLL was not locked, I am sure there was no problem with my SPI configuration process of DRS4.
toggle from DTAP could be viewed, but not stable.
Any Suggestions ?
thanks. |
|
93
|
Sat Jun 19 10:09:18 2010 |
Jinhong Wang | DVDD Problem of DRS 4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan
I designed the evaluation board for our experiment. On our boards, I encountered the similar problem when working on the PLL of DRS4. I compared the following two configuration process, which on with PLL locked, the other not,
Process1:
step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set DEnable high, thus do nothing but wait
I found DRS4 PLL working and locked.
Process 2:
Step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set Config. Register( "11111111" .of course, this step was not necessary, just to see whether SPI was working properly from DTAP when set to "11111110")
Step4: Set The read shift Register ( full read out mode)
Step5: Set DEnable high,
Step6: Set DWrite high , thus low it , and prepare to read the waveform.
Well, I found in this case, the PLL was not locked, I am sure there was no problem with my SPI configuration process of DRS4.
toggle from DTAP could be viewed, but not stable.
Any Suggestions ?
thanks.
|
So the main difference, if I understand correctly, is the setting of the Config Register. Actually I never tried that, I always went with the default settings (all "1"). What happens if you write "00000000"? You know Bit1 controls the PLL, maybe there is a bug and the signal needs to be inverted.
|
Hi, Stefan,
The problem was fixed by setting Reg_addr "1001" instead of "1111" when in idle state, I was confused. |
|
94
|
Tue Jun 22 10:50:19 2010 |
Jinhong Wang | Reset of DRS4 | Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong |
|
96
|
Tue Jun 22 11:29:26 2010 |
Jinhong Wang | Reset of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset?
|
Yes, they are stay low until Reset goes high. the process is as following
Step1: Reset ='1', DEnable ='0', DWrite ='0', Reg_addr ="1111", Rsload='0', Srin ='0'
Step2: Reset='0', the others do not change, the low of the pulse is longer than 10 ns.
Step3: Reset='1', the others do not change, wait for some time
Step4: DEnable ='1' to start the domino. |
|
98
|
Tue Jun 22 11:37:42 2010 |
Jinhong Wang | Reset of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset?
|
Yes, they are stay low until Reset goes high. the process is as following
Step1: Reset ='1', DEnable ='0', DWrite ='0', Reg_addr ="1111", Rsload='0', Srin ='0'
Step2: Reset='0', the others do not change, the low of the pulse is longer than 10 ns.
Step3: Reset='1', the others do not change, wait for some time
Step4: DEnable ='1' to start the domino.
|
Ok, then I have no idea. I never tried several reset pulses (actually this is not needed), so I have to reproduce the problem myself and investigate it. Actually in all my designs the reset input is just left open, since the internal initial reset is enough, so I have to modify my design first...
|
Ok ,thank you. |
|
104
|
Mon Jul 19 12:07:04 2010 |
Jinhong Wang | Fixed Patter Timing Jitter | Hi Stefan, can you give some suggestions on determination of fixed pattern timing jitter of DRS4? Thanks~ |
|
106
|
Wed Jul 21 10:46:32 2010 |
Jinhong Wang | ENOB of DRS | Hi, Stefan, I see in your ppt "Design and performance of 6 GSPS waveform digitizing chip DRS4" , you define DRS4 ENOB as 1Vpp/0.35mv(RMS) = 11.5bit, where, 1Vpp is the linearity input range, and 0.35mv is the rms voltage after offset correction. What I understand is that 0.35mV is obtained from DC offset Correction, hence 11.5 bit is for DC input, am i right? If true, what about ENOB for AC input in the whole analog bandwidth? thanks~ |
|
110
|
Tue Oct 12 03:53:37 2010 |
Jinhong Wang | Reference design for DRS4 active input buffer |
| Stefan Ritt wrote: |
|
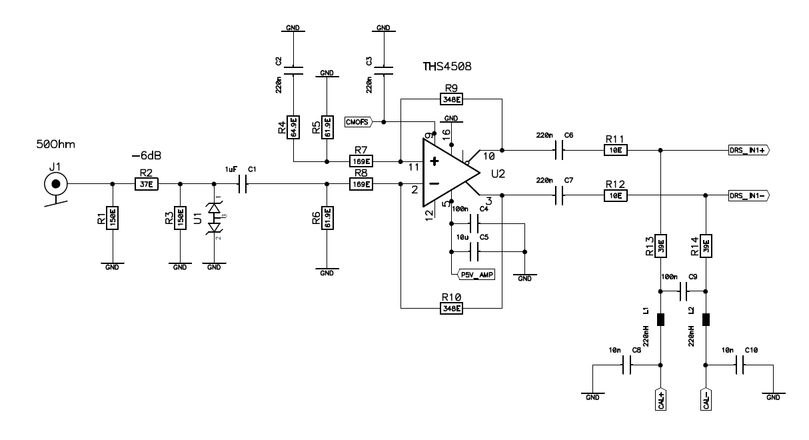
The design of high frequency differential input stages with the DRS4 is a challenge, since the chip draws quite some current at the input (up to 1 mA at 5 GSPS), which must be sourced by the input buffer. A simple transformer as used in the DRS4 Evaluation Board 2.0 limits the bandwidth to 220 MHz. In meantime two active input stages have been worked out and successfully been tested, both utilizing the THS4508 differential amplifier. The first design is AC-coupled and uses less power, the second design is DC-coupled and uses more power with the benefit of delivering a higher bandwidth.
Both designs use a clamping diode at the input as a protection against high voltage spikes at the input. We used a RCLAMP0502B diode from SEMTECH, but any fast voltage suppressor diode will do the job.
The CMOFS input to the THS4508 set the common mode of the differential amplifier. In the AC version the level is set to mid-rail (2.5V), in the DC version it's set to 1.8V to match the input range of the DRS4.
The CAL+ and CAL- signals are used to bias the inputs to a well-defined DC level and can also be used to calibrate the chip. For bipolar inputs, they are both set to 0.8V. A positive 0.5V input pulse then drives DRS_IN+ to (0.8+0.25)V = 1.05V and DRS_IN- to (0.8-0.25)V = 0.55V. A negative 0.5V pulse then drives then DRS_IN+ to 0.55V and DRS_IN- to 1.05V. With ROFS=1.6V, the full dynamic range of the DRS4 is then used. Note that the THS4508 has a gain of 2, and the input has a -6dB voltage divider to compensate for that. To use other input ranges, such as -1V...0V, the CAL+ and CAL- signals can be adjusted accordingly. Note that the inputs of the DRS4 must always be between 0.1V and 1.5V.
AC-coupled version
(click to enlarge)
Power supply: +5 V 40 mA
Bandwidth (-3dB): 600 MHz
CMOFS: 2.5 V
Transfer function:
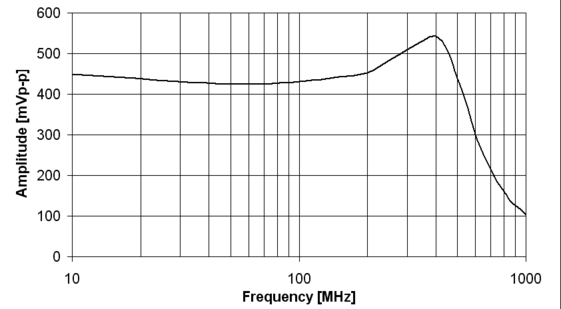
(click to enlarge)
The transfer function was measured by applying a fixed amplitude sine wave to the input, and measuring the peak-to-peak value of the read out waveform with the DRSOsc application.
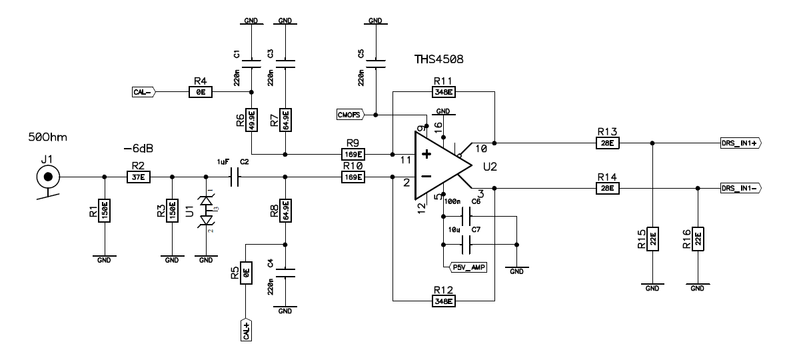
DC-coupled Version
The DC-coupled version has a slightly higher power consumption since there is a constant current flowing through the output into the DRS4 chip. On the other hand, the bandwidth is a bit higher and the peaking around 400 MHz is a bit smaller. The input is still AC-coupled, so both positive and negative pulses can be accepted.
(click to enlarge)
Power supply: +5 V 115 mA
Bandwidth (-3dB): 800 MHz
CMOFS: 1.8 V
Transfer function:
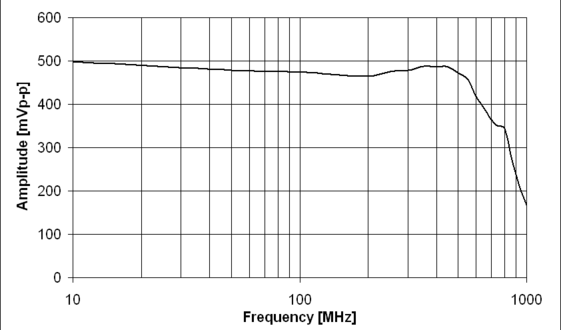
(click to enlarge)
Achievable performance
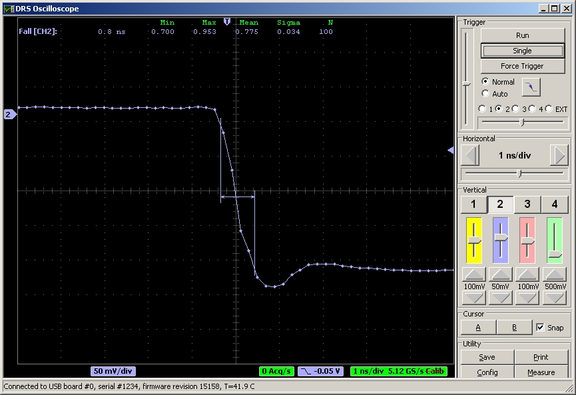
With the active input stage, much faster rise- and fall times can be achieved. Following picture shows a signal from a external clock having a fall time of about 300 ps being recorded with the AC-coupled version of the active input stage. The fall time of the recorded signal is about 800 ps, which is about the minimum which can be achieved with the AC-coupled version. The DC-coupled version achieves about 700ps.
|
Hi, stefan,
In the DC coupled version of the analog drivers for DRS4 input in Eval. Board V3, you mentioned that CMOFS of THS4508 was set to 1.8V to match the input range of DRS4, however, will this clash with the requirements of DRS4 input voltage between 0.1 V ~1.5V ? The output of THS4508 can easily rise beyond 1.5V for CMOFS=1.8V. I also noticed the resister paris R13/R15, R14/R16 was added among the output of THS4508 and the inputs of DRS4, were these resister pairs were used to attenuate the level of THS4508 output signal (a half ? ) to match the input requirements of DRS4? Maybe I have some misunderstanding about it.
|
|
121
|
Mon Jul 4 05:06:00 2011 |
Jinhong Wang | Fixed Patter Timing Jitter |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan, can you give some suggestions on determination of fixed pattern timing jitter of DRS4? Thanks~
|
I will prepare some more detailed description of how to do this in the near future, but we are still learning ourselves constantly how to do that better.
So for the moment I only can recommend you to read the function DRSBoard::CalibrateTiming() and AnalyzeWF(). What you basically do is to define an array of "effective" bin widths t[i]. You start with the nominal bin width (let's say 500ps at 2 GSPS). Now you measure a periodic signal, and look for the zero crossings. If you have a 100 MHz clock, the time between two positive transitions (low-to-high) is 10.000ns. Now you measure the width as seen by the DRS chip, assuming the effective bin widths. The exact zero crossing you interpolate between two samples to improve the accuracy. Now you measure something different, let's say 10.1ns. So you know the ~20 bins between the zero crossings are "too wide", but you don't know which one of them is too wide. So you distribute the "too wide" equally between all bins, that is you decrease the effective width of these bins from 500ps to 500-0.1ns/20=499.995 ps. Then you do this iteratively, that is for all cycles in the waveform, and for many (1000's) of recorded waveforms. It is important that the phase of you measured clock is random, so that all bins are covered equally. Then you realize that the solution oscillates, which you can reduce by using a damping factor (called "damping" in my C code). So you do not correct to 499.995ps, but maybe to 499.999ps. If you iterate often enough, the solution kind of stabilizes.
The attached picture shows the result of such a calibration. Green is the effective bin width which in the end only slightly deviates from 500ps. But the "integral temporal nonlinearity" shows a typical shape for the DRS chip. It's defined as
n
Ti[n] = Sum (t[i]-500ps)
i=0
where t[i] is the effective bin width. So Ti[0] is zero by definition, but the deviation around bin 450 can go up to 1ns at 2 GSPS.
Now you can test you calibration, by measuring again the period of your clock. If you do everything correctly and have a low jitter external clock and no noise on your DRS4 power supply voltages, you should see a residual jitter of about 40ps.
Hope this explanation helps a bit. Let me know if I was not clear enough at some points.
- Stefan
|
Hi, Stefan,
I noticed other groups of SCA reported the technique to histogram the zero crossings of a sine wave, and use the bin occupancy to derive the effective aperture width. Recently , I tried this technique to DRS4. In my test, the frequency of the sine wave was selected uncorrelated to the domino frequency.The results were discouraging. Large variations of the domino tap delay was observed. Besides, I also tried to induce an external trigger, which is uncorrelated to the domino frequency, and histogram the stop positions. Unfortunately, large variations were obtained again. I knew there must be something wrong. Do you have any suggestions?
The attachment is the histogram of the stop positions (the vertical axis is the bin count, the horizontal axis is the bin number). First, I calculate the ration of each bin count to the total counts, supposed the total count is 10000, count of bin 37 is 12, so the corresponding ratio is 12/10000=0.0012. The bin delay is derived by multiplying its ratio to the whole domino period (1024*1/FSamp, eg., for 5 GSP/s, this period is 200ps *1024). (The bin delay i observed was with an variation of about 30 ps). If the external trigger is uncorrelated to the domino frequency, so, the stop positions are supposed to distribute equally to all bins? If this is true, can i calculate the bin delay via the histogram ?
thank you~
Wang Jinhong |
| Attachment 1: hist_stoppos.jpg
|

|
|
123
|
Tue Jul 12 09:49:08 2011 |
Jinhong Wang | Fixed Patter Timing Jitter |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan, can you give some suggestions on determination of fixed pattern timing jitter of DRS4? Thanks~
|
I will prepare some more detailed description of how to do this in the near future, but we are still learning ourselves constantly how to do that better.
So for the moment I only can recommend you to read the function DRSBoard::CalibrateTiming() and AnalyzeWF(). What you basically do is to define an array of "effective" bin widths t[i]. You start with the nominal bin width (let's say 500ps at 2 GSPS). Now you measure a periodic signal, and look for the zero crossings. If you have a 100 MHz clock, the time between two positive transitions (low-to-high) is 10.000ns. Now you measure the width as seen by the DRS chip, assuming the effective bin widths. The exact zero crossing you interpolate between two samples to improve the accuracy. Now you measure something different, let's say 10.1ns. So you know the ~20 bins between the zero crossings are "too wide", but you don't know which one of them is too wide. So you distribute the "too wide" equally between all bins, that is you decrease the effective width of these bins from 500ps to 500-0.1ns/20=499.995 ps. Then you do this iteratively, that is for all cycles in the waveform, and for many (1000's) of recorded waveforms. It is important that the phase of you measured clock is random, so that all bins are covered equally. Then you realize that the solution oscillates, which you can reduce by using a damping factor (called "damping" in my C code). So you do not correct to 499.995ps, but maybe to 499.999ps. If you iterate often enough, the solution kind of stabilizes.
The attached picture shows the result of such a calibration. Green is the effective bin width which in the end only slightly deviates from 500ps. But the "integral temporal nonlinearity" shows a typical shape for the DRS chip. It's defined as
n
Ti[n] = Sum (t[i]-500ps)
i=0
where t[i] is the effective bin width. So Ti[0] is zero by definition, but the deviation around bin 450 can go up to 1ns at 2 GSPS.
Now you can test you calibration, by measuring again the period of your clock. If you do everything correctly and have a low jitter external clock and no noise on your DRS4 power supply voltages, you should see a residual jitter of about 40ps.
Hope this explanation helps a bit. Let me know if I was not clear enough at some points.
- Stefan
|
Hi, Stefan,
I noticed other groups of SCA reported the technique to histogram the zero crossings of a sine wave, and use the bin occupancy to derive the effective aperture width. Recently , I tried this technique to DRS4. In my test, the frequency of the sine wave was selected uncorrelated to the domino frequency.The results were discouraging. Large variations of the domino tap delay was observed. Besides, I also tried to induce an external trigger, which is uncorrelated to the domino frequency, and histogram the stop positions. Unfortunately, large variations were obtained again. I knew there must be something wrong. Do you have any suggestions?
The attachment is the histogram of the stop positions (the vertical axis is the bin count, the horizontal axis is the bin number). First, I calculate the ration of each bin count to the total counts, supposed the total count is 10000, count of bin 37 is 12, so the corresponding ratio is 12/10000=0.0012. The bin delay is derived by multiplying its ratio to the whole domino period (1024*1/FSamp, eg., for 5 GSP/s, this period is 200ps *1024). (The bin delay i observed was with an variation of about 30 ps). If the external trigger is uncorrelated to the domino frequency, so, the stop positions are supposed to distribute equally to all bins? If this is true, can i calculate the bin delay via the histogram ?
thank you~
Wang Jinhong
|
One obvious problem in your method is your statistics. If you have n hits in a bin of the histogram, the error of n is sqrt(n). So if you measure 100 hits, this is more like 100+-10 hits. If you want a better precision, you need much higher statistics. I myself never used this method, but I attach a typical nonlinearity curve running at 2 GSPS, sot hat you know what you should expect. I do some smoothing between neighbor bins so that they do not scatter too much. As you can see, the integral nonlinearity goes almost up to +-2 ns. This value is smaller at higher sampling speeds.
- Stefan
|
Thank you, Stefan. It is really kind of you to offer suggestions or comments on our concern.
Recently, we input a sine wave to our DRS board. DRS works at about 5 GS/s. The frequency varies from 131 MHz to 231MHz. The attached picture shows the reconstructed points of sine wave (vertical is the amplitude, horizontal axis is the point numbers). We noticed that the variation of the length of the zero crossing segments is very large. The max. length is perhaps two times the length of the min. I marked in blue color in the picture. It means the corresponding sampling interval of the max. is two times of that of the min. If this is true, DNL of the DRS sampling interval would be very large. We know, for uniform sampling, the length of the zero crossing segments are assumed to be uniform. Do you have any comments? Thank you~ |
| Attachment 1: 131MHz.jpg
|

|
|
212
|
Thu Dec 27 00:12:12 2012 |
Jinhong Wang | variation of sampling capacitors | Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong |
|
214
|
Thu Dec 27 18:15:14 2012 |
Jinhong Wang | variation of sampling capacitors |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong
|
The capacitors sample the input voltage, not the charge, so the actual size of the capacitors does not matter on first order (the variations might be in the order of 5%). A bigger effect is the variation of the analog switches in the front of the capacitors, which is about 15%. So the actual bandwidth each cell sees varies by maybe 20% (given by the R and the C), but this comes only into play when sampling steep edges.
Stefan
|
Great to know this! Thanks~
Jinhong |
|
215
|
Fri Feb 1 17:43:48 2013 |
Jinhong Wang | variation of sampling capacitors |
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong
|
The capacitors sample the input voltage, not the charge, so the actual size of the capacitors does not matter on first order (the variations might be in the order of 5%). A bigger effect is the variation of the analog switches in the front of the capacitors, which is about 15%. So the actual bandwidth each cell sees varies by maybe 20% (given by the R and the C), but this comes only into play when sampling steep edges.
Stefan
|
Great to know this! Thanks~
Jinhong
|
Hi Dr. Stefan,
So the sampling capacitors store the input voltage instead of the charge. What about the readout circuits? I saw there is a buffer followed each sampling capacitor. Do you buffer the charge (like a charge sensitive amplifier) or the voltage? From Fig.12, 14 in datasheet, it seems most probably the readout is a charging or discharging of a capacitor. Could you please add some comments on this?
Cheers,
Jinhong |
|
781
|
Wed Oct 23 17:56:26 2019 |
John Jendzurski | Computing corrected time from binary data...what is t_0,0? | In the equations for computing the corrected time for channels other than channel 1, does anyone know what the term t0,0 refers to? This is the last term in the last equation on page 24 of DRS4 Evaluation Board User’s Manual, Board Revision 5 as of January 2014, Last revised: April 27, 2016.
Screenshot from User's Manual is attached below.
Thank you! |
| Attachment 1: Screenshot.png
|

|
|
903
|
Wed Oct 25 19:44:25 2023 |
John Westmoreland | WaveDREAM Design | Hello All,
Are there any design resources available for the WaveDREAM PCBA's?
Thanks In Advance,
John W. |
|