| ID |
Date |
Author |
Subject |
|
708
|
Mon Jul 16 19:39:35 2018 |
Woon-Seng Choong | Effect of interpolation on timing |
Using a test pulse split into two channels of the DRS4 Evaluation Board v5, I looked at the time resolution using a leading edge threshold. The voltage and timing calibration was performed. One method (1) is to linearly interpolate between two points of the raw waveform that is above and below the threshold (this is exactly the algorithm given in read_binary.c in the drs4 source distribution); and another (2) is to use a cubic spline interpolation of the raw waveform. The results I obtained are:
Method 1: dt = 1.298 ns +/- 7.22 ps
Method 2: dt = 1.293 ns +/- 15.48 ps
I am really puzzled why the time resolution of the spline interpolation is about a factor 2 worse than the simple linear interpolation. Has anyone studied the time resolution using similar or other interpolation methods?
|
|
709
|
Fri Jul 20 00:44:13 2018 |
Woon-Seng Choong | Effect of interpolation on timing |
Just a follow-up update.
It turns out that I was using a cubic spline interpolation with smoothing. If I required the cubic spline to go through the sampled points, then I obtained similar time resolution as the simple linear interpolation.
| Woon-Seng Choong wrote: |
|
Using a test pulse split into two channels of the DRS4 Evaluation Board v5, I looked at the time resolution using a leading edge threshold. The voltage and timing calibration was performed. One method (1) is to linearly interpolate between two points of the raw waveform that is above and below the threshold (this is exactly the algorithm given in read_binary.c in the drs4 source distribution); and another (2) is to use a cubic spline interpolation of the raw waveform. The results I obtained are:
Method 1: dt = 1.298 ns +/- 7.22 ps
Method 2: dt = 1.293 ns +/- 15.48 ps
I am really puzzled why the time resolution of the spline interpolation is about a factor 2 worse than the simple linear interpolation. Has anyone studied the time resolution using similar or other interpolation methods?
|
|
|
276
|
Tue Jul 23 22:31:08 2013 |
alonzi | Evaluation Board Behavior |
Working with the DRS evaluation board we noticed some funny behavior: See attatchment 1. In about 1% of scope traces we see the first and last bin take on a value substantially different from the baseline, note the small spikes on the end of the traces. These spikes occur across all channels and either appear in all channels or in none. Attachment two shows what several thousand scope traces look like. You can clearly see that some of the traces are offset from the normal base line. Has anyone observed this behavior before? Any ideas?
see https://muon.npl.washington.edu/elog/g2/Detectors/550 for full discussion. |
|
277
|
Tue Jul 23 22:35:08 2013 |
Stefan Ritt | Evaluation Board Behavior |
| alonzi wrote: |
|
Working with the DRS evaluation board we noticed some funny behavior: See attatchment 1. In about 1% of scope traces we see the first and last bin take on a value substantially different from the baseline, note the small spikes on the end of the traces. These spikes occur across all channels and either appear in all channels or in none. Attachment two shows what several thousand scope traces look like. You can clearly see that some of the traces are offset from the normal base line. Has anyone observed this behavior before? Any ideas?
see https://muon.npl.washington.edu/elog/g2/Detectors/550 for full discussion.
|
Actually the first and last sample are even more off the baseline, so I cut them out in software in the DRSOscilloscope. So actually the chip has only 1022 "usable" cells. It might happen in some rare cases that more cells are affected, although I have not yet seen this (maybe I did not look close enough). So I propose that you cut out one more bin at the beginning and the end, so a total of 1020 cells, and you should be fine.
/Stefan |
|
278
|
Tue Jul 23 22:42:31 2013 |
alonzi | Evaluation Board Behavior |
| Stefan Ritt wrote: |
|
| alonzi wrote: |
|
Working with the DRS evaluation board we noticed some funny behavior: See attatchment 1. In about 1% of scope traces we see the first and last bin take on a value substantially different from the baseline, note the small spikes on the end of the traces. These spikes occur across all channels and either appear in all channels or in none. Attachment two shows what several thousand scope traces look like. You can clearly see that some of the traces are offset from the normal base line. Has anyone observed this behavior before? Any ideas?
see https://muon.npl.washington.edu/elog/g2/Detectors/550 for full discussion.
|
Actually the first and last sample are even more off the baseline, so I cut them out in software in the DRSOscilloscope. So actually the chip has only 1022 "usable" cells. It might happen in some rare cases that more cells are affected, although I have not yet seen this (maybe I did not look close enough). So I propose that you cut out one more bin at the beginning and the end, so a total of 1020 cells, and you should be fine.
/Stefan
|
Thanks for the quick reply. Our quick fix was to do just that. |
|
279
|
Thu Jul 25 01:31:29 2013 |
Andrey Kuznetsov | Evaluation Board Behavior |
| alonzi wrote: |
|
| Stefan Ritt wrote: |
|
| alonzi wrote: |
|
Working with the DRS evaluation board we noticed some funny behavior: See attatchment 1. In about 1% of scope traces we see the first and last bin take on a value substantially different from the baseline, note the small spikes on the end of the traces. These spikes occur across all channels and either appear in all channels or in none. Attachment two shows what several thousand scope traces look like. You can clearly see that some of the traces are offset from the normal base line. Has anyone observed this behavior before? Any ideas?
see https://muon.npl.washington.edu/elog/g2/Detectors/550 for full discussion.
|
Actually the first and last sample are even more off the baseline, so I cut them out in software in the DRSOscilloscope. So actually the chip has only 1022 "usable" cells. It might happen in some rare cases that more cells are affected, although I have not yet seen this (maybe I did not look close enough). So I propose that you cut out one more bin at the beginning and the end, so a total of 1020 cells, and you should be fine.
/Stefan
|
Thanks for the quick reply. Our quick fix was to do just that.
|
We've encountered similar issues with board v2.0. Cell #2 across all channels would occasionally go full negative amplitude (0 I guess).
I don't remember if calibration fixed the problem, might have. |
|
761
|
Sat Jul 13 01:00:15 2019 |
Brendan Posehn | Evaluation Board Test Functionality |
Hello,
I have recently obtained a DRS4 Evaluation Board (V5), but I am unable to register signals when using the DRS Oscilloscope application. There seems to be some difference in noise when I have an input connected to a signal or not, but I am unable to view a simple, 0.2V amplitude square wave or other small signals. The only way I have been able to view a waveform is when connecting the reference clock to all channels. When running 'info' in the DRS Command Line Interface I am shown correct information. I was wondering if there is any way for me to test the functionality of the board (specifially ability to read signals on Ch 1-4) to ensure that it is indeed working as expected?
Thanks,
Brendan |
|
762
|
Mon Jul 15 17:26:50 2019 |
Stefan Ritt | Evaluation Board Test Functionality |
Have you set the trigger correctly to the channel with your signal, polarity and level? Do you undersand the difference between normal and auto trigger? Why don't you post a screendump. Are you ABSOLUTELY SURE that you have a signal on your cable? Have you tried with another oscilloscope? Are you sure that your SMA connector is good?
Stefan
| Brendan Posehn wrote: |
|
Hello,
I have recently obtained a DRS4 Evaluation Board (V5), but I am unable to register signals when using the DRS Oscilloscope application. There seems to be some difference in noise when I have an input connected to a signal or not, but I am unable to view a simple, 0.2V amplitude square wave or other small signals. The only way I have been able to view a waveform is when connecting the reference clock to all channels. When running 'info' in the DRS Command Line Interface I am shown correct information. I was wondering if there is any way for me to test the functionality of the board (specifially ability to read signals on Ch 1-4) to ensure that it is indeed working as expected?
Thanks,
Brendan
|
|
|
763
|
Mon Jul 15 19:34:25 2019 |
Brendan Posehn | Evaluation Board Test Functionality |
Hello Stefan,
Thanks for the quick reply. The issue was a faulty SMA connector, should have checked this first. Signal looks good now.
Thanks for your time,
Brendan
| Stefan Ritt wrote: |
|
Have you set the trigger correctly to the channel with your signal, polarity and level? Do you undersand the difference between normal and auto trigger? Why don't you post a screendump. Are you ABSOLUTELY SURE that you have a signal on your cable? Have you tried with another oscilloscope? Are you sure that your SMA connector is good?
Stefan
| Brendan Posehn wrote: |
|
Hello,
I have recently obtained a DRS4 Evaluation Board (V5), but I am unable to register signals when using the DRS Oscilloscope application. There seems to be some difference in noise when I have an input connected to a signal or not, but I am unable to view a simple, 0.2V amplitude square wave or other small signals. The only way I have been able to view a waveform is when connecting the reference clock to all channels. When running 'info' in the DRS Command Line Interface I am shown correct information. I was wondering if there is any way for me to test the functionality of the board (specifially ability to read signals on Ch 1-4) to ensure that it is indeed working as expected?
Thanks,
Brendan
|
|
|
|
153
|
Wed Feb 15 18:08:13 2012 |
Yuji Iwai | Evaluation Board v4 Trigger/Clock Connectors |
Quick question - what type of connectors are used for the trigger and clock in/out on the v4 eval board? |
|
753
|
Thu Jun 20 01:36:48 2019 |
Andrew Peck | Evaluation firmware wait_vdd state |
Dear Stefan,
I am working with others at UCLA on a custom made board built around the DRS4. We are in the process of writing firmware so I am adapting the readout state machine from the evaluation board firmware.
I see in the state machine of the eval board firmware that after a trigger is received, the FPGA goes into the start readout state and then into "wait_vdd", where the FPGA waits "~120 us for vdd to stabilize" before reading out the ADC.
Our application is sensitive to deadtime and this wait_vdd state adds very significantly. I am trying to find anything explaining the necessity of wait_vdd in the documentation / elog and have only found so far your old forum posting, https://elog.psi.ch/elogs/DRS4+Forum/12
Does this forum posting explain wait_vdd or is there a another purpose that I have missed?
If this post is relevant to wait_vdd, does the advice of large capacitance and an LDO with fast transient response still apply or are there any new recommendations?
Thank you,
Andrew Peck |
|
754
|
Fri Jun 21 12:54:47 2019 |
Stefan Ritt | Evaluation firmware wait_vdd state |
Dear Andrew,
the posting you mention is still accurate. Any power supply will drop when you start the Domino wave, no matter how big your capacitor is. Unfortunately the output signal of the DRS4 scales with VDD. So if your VDD drops by 40 mV and you get a trigger and you immediately start the readout, the output baseline will also be shifted by about 40 mV. If you are sensitive to dead time, you can remove the wait_vdd state completely, but then you have to deal with varying baseline shifts. If you have narrow signals sitting on a broad baseline, you can correct for this by measuring the baseline outside your signal, then subtracting it before integrating your pulse. If you have lots of pile-up in your signals, it might sometimes be hard to evaluate the baseline on an event-by-event basis.
Stefan
| Andrew Peck wrote: |
|
Dear Stefan,
I am working with others at UCLA on a custom made board built around the DRS4. We are in the process of writing firmware so I am adapting the readout state machine from the evaluation board firmware.
I see in the state machine of the eval board firmware that after a trigger is received, the FPGA goes into the start readout state and then into "wait_vdd", where the FPGA waits "~120 us for vdd to stabilize" before reading out the ADC.
Our application is sensitive to deadtime and this wait_vdd state adds very significantly. I am trying to find anything explaining the necessity of wait_vdd in the documentation / elog and have only found so far your old forum posting, https://elog.psi.ch/elogs/DRS4+Forum/12
Does this forum posting explain wait_vdd or is there a another purpose that I have missed?
If this post is relevant to wait_vdd, does the advice of large capacitance and an LDO with fast transient response still apply or are there any new recommendations?
Thank you,
Andrew Peck
|
|
|
755
|
Mon Jun 24 23:07:35 2019 |
Andrew Peck | Evaluation firmware wait_vdd state |
Dear Stefan,
Thanks so much for clarifying this. We made wait_vdd a parameter controlled by software and will try to experiment with it to find some compromise between deadtime and the offset added by the droop in VDD.
Best regards,
Andrew
| Stefan Ritt wrote: |
|
Dear Andrew,
the posting you mention is still accurate. Any power supply will drop when you start the Domino wave, no matter how big your capacitor is. Unfortunately the output signal of the DRS4 scales with VDD. So if your VDD drops by 40 mV and you get a trigger and you immediately start the readout, the output baseline will also be shifted by about 40 mV. If you are sensitive to dead time, you can remove the wait_vdd state completely, but then you have to deal with varying baseline shifts. If you have narrow signals sitting on a broad baseline, you can correct for this by measuring the baseline outside your signal, then subtracting it before integrating your pulse. If you have lots of pile-up in your signals, it might sometimes be hard to evaluate the baseline on an event-by-event basis.
Stefan
| Andrew Peck wrote: |
|
Dear Stefan,
I am working with others at UCLA on a custom made board built around the DRS4. We are in the process of writing firmware so I am adapting the readout state machine from the evaluation board firmware.
I see in the state machine of the eval board firmware that after a trigger is received, the FPGA goes into the start readout state and then into "wait_vdd", where the FPGA waits "~120 us for vdd to stabilize" before reading out the ADC.
Our application is sensitive to deadtime and this wait_vdd state adds very significantly. I am trying to find anything explaining the necessity of wait_vdd in the documentation / elog and have only found so far your old forum posting, https://elog.psi.ch/elogs/DRS4+Forum/12
Does this forum posting explain wait_vdd or is there a another purpose that I have missed?
If this post is relevant to wait_vdd, does the advice of large capacitance and an LDO with fast transient response still apply or are there any new recommendations?
Thank you,
Andrew Peck
|
|
|
|
629
|
Wed Sep 27 16:11:03 2017 |
Yoni Sher | Event acquisition pace for irregular timing |
Hi,
I'm running a LIDAR application that requires that every outgoing pulse be captured. My current setup firess sets of 20-50 pulses at 1 ms intervals, about 10 times a second, but only 10-20 pulses a second are captured.
When I fire at full speed (1KHz - one pulse every ms), about 500-600 pulses a second are captured.
At the moment, I'm triggering on channel 1 and captureing the data on channel 2. Would it help if I used the external trigger? Is there anything else I can do?
Yoni |
|
630
|
Mon Oct 2 16:08:05 2017 |
Stefan Ritt | Event acquisition pace for irregular timing |
As written in the documentation, the DRS evaluaiton board has a maximum trigger capability of ~500 Hz. This is limited by the USB bus which has a finite data transfer rate. If you build your own electronics around the chip (like many other groups are doing), you can squeeze this to a few kHz, but it is some development effort.
Stefan
| Yoni Sher wrote: |
|
Hi,
I'm running a LIDAR application that requires that every outgoing pulse be captured. My current setup firess sets of 20-50 pulses at 1 ms intervals, about 10 times a second, but only 10-20 pulses a second are captured.
When I fire at full speed (1KHz - one pulse every ms), about 500-600 pulses a second are captured.
At the moment, I'm triggering on channel 1 and captureing the data on channel 2. Would it help if I used the external trigger? Is there anything else I can do?
Yoni
|
|
|
2
|
Wed Jan 14 12:02:04 2009 |
Stefan Ritt | External Trigger Input requirements |
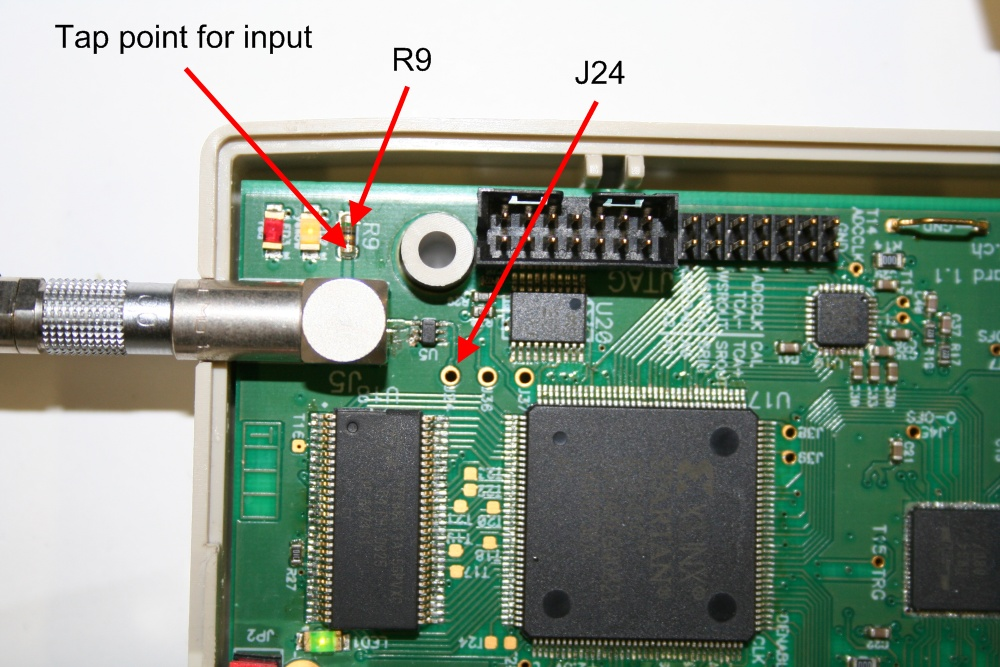
Several people mentioned that the external trigger input (TTL) does not work on the DRS4 Evaluation Board Rev. 1.1. This is not true. The requirement however is that the input signal must exceed approximately 1.8V. Since the input is terminated with 50 Ohms, not all TTL drivers may deliver enough current to exceed this threshold. To verify this, the trigger signal can be monitored with an oscilloscope at test point J24. Only if the input signal exceeds 1.8V, the signal will be seen at J24 and correctly trigger the FPGA. If the TTL driver is too weak, the termination resistor R9 can be optionally removed, but care should then be taken that reflections in the trigger input do not cause double triggers. The locations of the tap point for the input signal, the termination resistor R9 and the tap point J24 after the input level converter U5 are shown in this image:
|
|
3
|
Wed Jan 14 13:41:44 2009 |
Stefan Ritt | External Trigger Input requirements |
Another tricky issue comes from the fact that the external TTL trigger and the comparator are in a logical OR. So if the comparator level is set such that the signal is always over the threshold, the trigger is always "on" and the TTL trigger does not have any effect. It is therefore necessary to set the analog trigger level to a very high value in order to make the TTL trigger work. |
|
843
|
Tue Oct 26 10:41:46 2021 |
Mehrpad Monajem | External trigger and drs_exam |
Hi Stefan,
I have two problems regarding using the drs_exam file with external trigger:
1- I connected a 200Khz signal with 20ns rising edge, 50 ohm load, and 27% duty cycle as an external trigger. The output of the drs_exam file starts from 0 to 200ns. Since I use an external trigger, I think it should be starting from 0 to 5ns and then again starting from 0. Could you please tell me where the problem is?
2- How is it possible to change from 1024 to 2048 bins in the drs_exam example?
You can find my code in the attachment.
Best regards,
Mehrpad |
|
844
|
Tue Oct 26 12:00:51 2021 |
Stefan Ritt | External trigger and drs_exam |
1. Why should your waveform start from 0 to 5ns? I don't get your point. Whenever you trigger a readout, you get a 200ns wide time window, and by definition it starts at zero.
2. In the software distribution you have a drs_exam_2048.cpp program. Note that your board needs to be physically modified before delivery to switch to 2048 bins.
Best,
Stefan
| Mehrpad Monajem wrote: |
|
Hi Stefan,
I have two problems regarding using the drs_exam file with external trigger:
1- I connected a 200Khz signal with 20ns rising edge, 50 ohm load, and 27% duty cycle as an external trigger. The output of the drs_exam file starts from 0 to 200ns. Since I use an external trigger, I think it should be starting from 0 to 5ns and then again starting from 0. Could you please tell me where the problem is?
2- How is it possible to change from 1024 to 2048 bins in the drs_exam example?
You can find my code in the attachment.
Best regards,
Mehrpad
|
|
|
846
|
Tue Oct 26 15:05:18 2021 |
Mehrpad Monajem | External trigger and drs_exam |
Thanks for your reply.
1- I want to have a window size of 25.6ns instead of 200ns at 5GSPS. I have a 200khz high voltage pulser, which applies a pulse to my sample. I want to digitize the detector signal for each pulse (each pulse has a 25.6ns period). The pulser and digitizer use same 200khz trigger signal from each channel of the signal generator.
2- My DRS board has a 2048 combined stick on it. But the software distribution that I have doesn't contain the drs_exam_2048.cpp program. Could you please send the link that I can download this program? I can't find it under the link below.
link: https://www.dropbox.com/sh/clqo7ekr0ysbrip/AACoWJzrQAbf3WiBJHG89bGGa?dl=0
Best regards,
Mehrpad
| Stefan Ritt wrote: |
|
1. Why should your waveform start from 0 to 5ns? I don't get your point. Whenever you trigger a readout, you get a 200ns wide time window, and by definition it starts at zero.
2. In the software distribution you have a drs_exam_2048.cpp program. Note that your board needs to be physically modified before delivery to switch to 2048 bins.
Best,
Stefan
| Mehrpad Monajem wrote: |
|
Hi Stefan,
I have two problems regarding using the drs_exam file with external trigger:
1- I connected a 200Khz signal with 20ns rising edge, 50 ohm load, and 27% duty cycle as an external trigger. The output of the drs_exam file starts from 0 to 200ns. Since I use an external trigger, I think it should be starting from 0 to 5ns and then again starting from 0. Could you please tell me where the problem is?
2- How is it possible to change from 1024 to 2048 bins in the drs_exam example?
You can find my code in the attachment.
Best regards,
Mehrpad
|
|
|