Many applications using the DRS4 need to measure fast rising signals, like for PMTs or MCPs. This short note shows the minimal rise-times which can be measured with different input signal conditioning.
Evaluation Board
The evaluation board contains four passive transformers ADT1-1WT from Mini-Circuits to convert the single-ended input signal into a differential signal. Although these parts are rated 800 MHz bandwidth (-3dB), they have hard time to drive the DRS4 inputs. This is because at high frequencies the input impedance of DRS4 becomes pretty small (~20 Ohm at 500 MHz) due to its capacitive nature. Furthermore, each transformer drives two DRS4 inputs (channel cascading) which enhances this problem by a factor of two. We made a quick test sending a signal to the evaluation board with a rise time of 277ps and a fall time of 280ps. The result measured with the evaluation board is seen here:
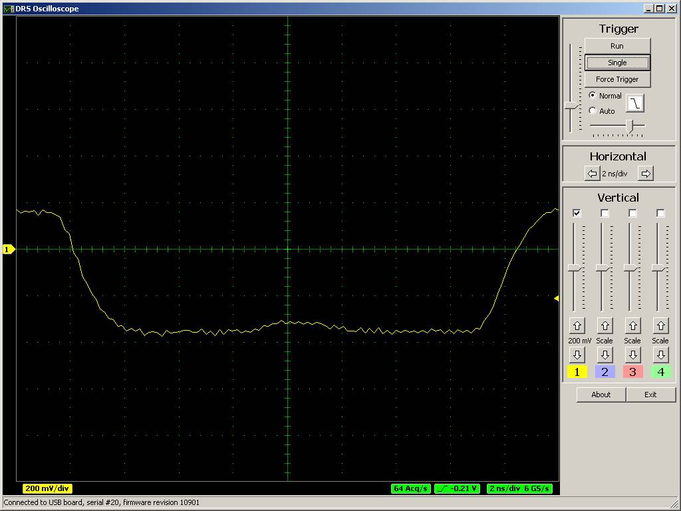
The measured rise-time (10%-90%) is only about 2ns. Disconnecting the second channel from each transformer improves this situation a bit:
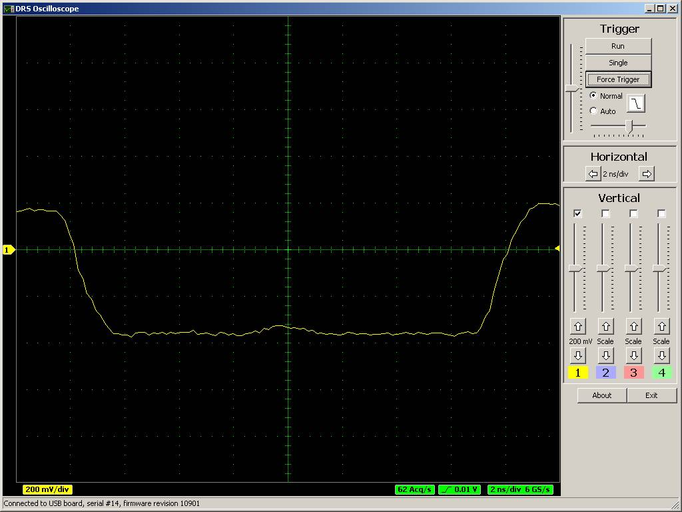
so the rise-time comes down to ~1.6ns.
Active ADA4937 driver
We tested the behavior using an active buffer ADA4937 to replace the passive transformer. Without the DRS4 connected to this buffer, we measured with the oscilloscope a rise time of 408ps and a fall time of 644ps. When we connect the DRS4 (single channel), this values increase to 702ps (rise) and 1400ps (fall), all measured with a differential oscilloscope probe (WL300 4 GHz Bandwidth, LeCroy 7300A, 3 GHz Bandwidth). In this case the rise time seen by the DRS4 is wieth ~700ps accordingly shorter:
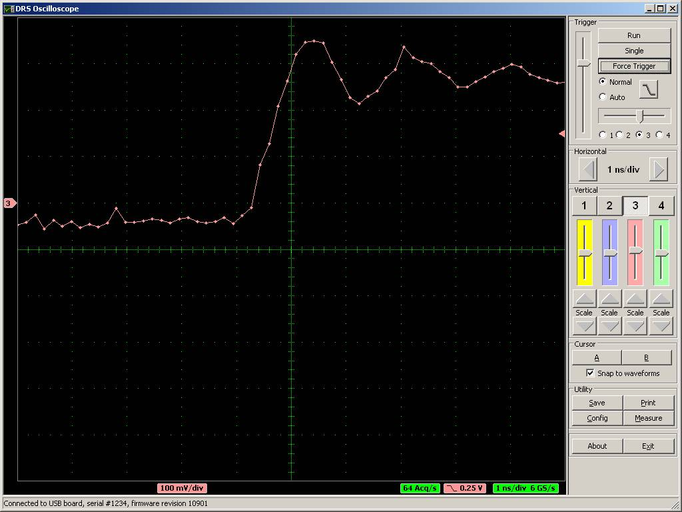
(The signal was not properly terminated and therefore we have a small overswing).
Conclusion
To obtain an optimal rise-time measurement, the design of the input stage is rather important. A fast active driver seems to do a better job than a passive transformer (which was used on the evaluation board for power reasons). Connecting only one DRS4 channel to the input improves the rise-time measurement significantly. If channel cascading is still needed, a design should use one driver for each channel, and not driver two or more DRS4 inputs from a single buffer.
If anybody comes up with an even better input driver, I'm happy to publish the results here. |