 Mon Aug 18 06:52:51 2025, Jonathan Bradshaw, Unexpected behaviour following RSRLOAD Mon Aug 18 06:52:51 2025, Jonathan Bradshaw, Unexpected behaviour following RSRLOAD
|
Hello
I'm working to bring up a new capture board using a DRS4 and I'm having a minor problem and a major problem.
Minor problem: if I send a reset signal into the DRS4, the PLL doesn't work right. If I leave NRSESET pin with a wek pullup (and never 'manually' reset the DRS4) it runs OK. Is there some minimum time I need to observe between sending a NRESET pulse and setting DENABLE high to start the PLL?
Major problem: I can't get the stop position.
What am I doing?
- Set DENABLE high
- Wait until DRS capture is requested (seconds to minutes)
- Configure Write Shift Register with 0b01010101
- Configure Write Control Register with 0b11111111
- Fill the Read Shift Register with 1024x '0's
- Set DWRITE high
- Await trigger (some milliseconds). During this phase address = 0b1011
- Set DWRITE low
- Wait ~ 40 ns
- Set address = 0b1101
- Wait ~ 150 us
- Pulse RSRLOAD high for 30 ns
- Wait 30 ns
- Sample SROUT to get top bit of Write Shift Register
- Set address = 0b0000
- Wait ~ 350 ns
- Begin clocking out analog samples
What's going wrong?
- When I look at the first 10 bits out of SROUT, I should see stop positions. However, these bits are almost always zero (I get 7 bits which are always 0 followed by 3 bits which are sometimes ones)
- When I probe the WSROUT pin (and remembering that DWRITE is low at this point), I expected to see a single one bit coming out of the read shift register as I apply 1024 pulses to SRCLK. Instead, I am seeing two set bits coming out of the read shift register
- When I plot the captured analog waveform it's a mess - it seems like 2 analog output buffers are enabling at once and fighting over the output voltage
Do you have any suggestions or warnings about proper deployment of the RSRLOAD pin?
I left this a bit late in my day for posting, so I'll need to follow up with some 'scope captures tomorrow. |
 Tue Aug 19 02:40:58 2025, Jonathan Bradshaw, Unexpected behaviour following RSRLOAD 6x Tue Aug 19 02:40:58 2025, Jonathan Bradshaw, Unexpected behaviour following RSRLOAD 6x
|
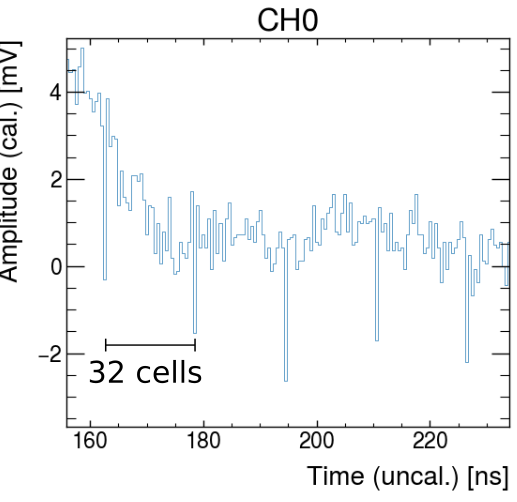
Some images
Notes:
- top of the puicture shows the logic channels
- Red: SRCLK
- Blue: SRIN
- Green: SROUT
- Orange: normally WSROUT, but swapped to RSRLOAD for last picture
| Jonathan Bradshaw wrote: |
|
Hello
I'm working to bring up a new capture board using a DRS4 and I'm having a minor problem and a major problem.
Minor problem: if I send a reset signal into the DRS4, the PLL doesn't work right. If I leave NRSESET pin with a wek pullup (and never 'manually' reset the DRS4) it runs OK. Is there some minimum time I need to observe between sending a NRESET pulse and setting DENABLE high to start the PLL?
Major problem: I can't get the stop position.
What am I doing?
- Set DENABLE high
- Wait until DRS capture is requested (seconds to minutes)
- Configure Write Shift Register with 0b01010101
- Configure Write Control Register with 0b11111111
- Fill the Read Shift Register with 1024x '0's
- Set DWRITE high
- Await trigger (some milliseconds). During this phase address = 0b1011
- Set DWRITE low
- Wait ~ 40 ns
- Set address = 0b1101
- Wait ~ 150 us
- Pulse RSRLOAD high for 30 ns
- Wait 30 ns
- Sample SROUT to get top bit of Write Shift Register
- Set address = 0b0000
- Wait ~ 350 ns
- Begin clocking out analog samples
What's going wrong?
- When I look at the first 10 bits out of SROUT, I should see stop positions. However, these bits are almost always zero (I get 7 bits which are always 0 followed by 3 bits which are sometimes ones)
- When I probe the WSROUT pin (and remembering that DWRITE is low at this point), I expected to see a single one bit coming out of the read shift register as I apply 1024 pulses to SRCLK. Instead, I am seeing two set bits coming out of the read shift register
- When I plot the captured analog waveform it's a mess - it seems like 2 analog output buffers are enabling at once and fighting over the output voltage
Do you have any suggestions or warnings about proper deployment of the RSRLOAD pin?
I left this a bit late in my day for posting, so I'll need to follow up with some 'scope captures tomorrow.
|
|
|
Tue Aug 19 23:10:30 2025, Jonathan Bradshaw, Unexpected behaviour following RSRLOAD
|
Turns out it was a damaged DRS4 IC.
I ported the drs4_eval5_app code onto our board and observed much the same misbehaviour. So I bit the bullet and replaced the DRS4 IC, and things are going better.
| Jonathan Bradshaw wrote: |
|
Some images
Notes:
- top of the puicture shows the logic channels
- Red: SRCLK
- Blue: SRIN
- Green: SROUT
- Orange: normally WSROUT, but swapped to RSRLOAD for last picture
| Jonathan Bradshaw wrote: |
|
Hello
I'm working to bring up a new capture board using a DRS4 and I'm having a minor problem and a major problem.
Minor problem: if I send a reset signal into the DRS4, the PLL doesn't work right. If I leave NRSESET pin with a wek pullup (and never 'manually' reset the DRS4) it runs OK. Is there some minimum time I need to observe between sending a NRESET pulse and setting DENABLE high to start the PLL?
Major problem: I can't get the stop position.
What am I doing?
- Set DENABLE high
- Wait until DRS capture is requested (seconds to minutes)
- Configure Write Shift Register with 0b01010101
- Configure Write Control Register with 0b11111111
- Fill the Read Shift Register with 1024x '0's
- Set DWRITE high
- Await trigger (some milliseconds). During this phase address = 0b1011
- Set DWRITE low
- Wait ~ 40 ns
- Set address = 0b1101
- Wait ~ 150 us
- Pulse RSRLOAD high for 30 ns
- Wait 30 ns
- Sample SROUT to get top bit of Write Shift Register
- Set address = 0b0000
- Wait ~ 350 ns
- Begin clocking out analog samples
What's going wrong?
- When I look at the first 10 bits out of SROUT, I should see stop positions. However, these bits are almost always zero (I get 7 bits which are always 0 followed by 3 bits which are sometimes ones)
- When I probe the WSROUT pin (and remembering that DWRITE is low at this point), I expected to see a single one bit coming out of the read shift register as I apply 1024 pulses to SRCLK. Instead, I am seeing two set bits coming out of the read shift register
- When I plot the captured analog waveform it's a mess - it seems like 2 analog output buffers are enabling at once and fighting over the output voltage
Do you have any suggestions or warnings about proper deployment of the RSRLOAD pin?
I left this a bit late in my day for posting, so I'll need to follow up with some 'scope captures tomorrow.
|
|
|
|
Sat Jul 5 04:36:13 2025, Sandeep Godiyal, Wrong Firmware Version: board has 13279, required is 15147. Board may not work properly
|
I am using DRS4 Evaluation Board Rev.: 2.0.. Command Line interface: "drscl" detecting the board with message: Found DRS4 board 0 on USB, serial #2034, firmware revision 13279, also info command also working.
In "drsosc" interface: Getting this message: Wrong Firmware Version: board has 13279, required is 15147. Board may not work properly. In "config" I checked it is detecting the board.
Software version, I am using is: "drs505.exe"
How can I resolve these issues, please guide! |
|
Mon Jul 7 16:53:26 2025, Stefan Ritt, Wrong Firmware Version: board has 13279, required is 15147. Board may not work properly
|
You have to use the software belonging to that board. You cannot use the newest software with an old board. Look here:
https://www.psi.ch/en/ltp-muon-physics/software-download
So you need teh software version 2.0.
/Stefan
|
|
Thu May 8 23:41:03 2025, Jonathan Bradshaw, Handling of Write Shift Register and Write Config Register
|
Hi all
We're building a product which will use two different operating modes; firstly a long capcture using channel daisy chaining (2048 samples) and secondly a segmented capture (2 separate captures of 1024 samples each).
For the long capture, I'm looking to capture 2048 samples for 4 channels. Therefore I configure the Write Shift Register to 0b01010101 and the Write Config Register to 0b11111111. During capture with DWRITE=1 the Write Shift Register will update. Am I correct that once the capture is done and DWRITE=0, I can set A3..0 to 0b1101 and simply read the value of WSROUT to tell the difference?
For the segmented capture, I'm looking to capture 1024 samples for 4 channels on a first tirgger pulse, followed by 1024 samples for 4 channels on a second pulse. Therefore I configure the Write Shift Register to 0b11111111 and the Write Config Register to 0b01010101 and set DWRITE=0 to capture. After the first trigger I set DWRITE=0 and need to update the Write Config Register. Do I need to write in a whole 8 bits to the Write Config Register (i.e. 0b10101010), or can I just shift in a single new bit (value 0b0)? |
|
Fri May 9 08:17:50 2025, Stefan Ritt, Handling of Write Shift Register and Write Config Register
|
This is correct. Setting A0-A3 to 0b1101 multiplexes the Shift Write Register to SROUT, so you will either a "0" or a "1" depending on which of the two channels was written last.
Your segmented capture does unfortunately not work. Due to a bug in the silicon, the first (e.g. even) written channel gets half overwritten when you start sampling the second (odd) channel. I should remove that from the documentation.
Furthermore, reading the chip while writing on the "other side" introduces quite some additional noise. The recommended way to do simultaneous reading and writing is therefore to use two separate DRS4 chips and split the input signals to both chips, then read from one chip while writing to the other chip. This keeps the crosstalk at a minimum and both chips run at full performance.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi all
We're building a product which will use two different operating modes; firstly a long capcture using channel daisy chaining (2048 samples) and secondly a segmented capture (2 separate captures of 1024 samples each).
For the long capture, I'm looking to capture 2048 samples for 4 channels. Therefore I configure the Write Shift Register to 0b01010101 and the Write Config Register to 0b11111111. During capture with DWRITE=1 the Write Shift Register will update. Am I correct that once the capture is done and DWRITE=0, I can set A3..0 to 0b1101 and simply read the value of WSROUT to tell the difference?
For the segmented capture, I'm looking to capture 1024 samples for 4 channels on a first tirgger pulse, followed by 1024 samples for 4 channels on a second pulse. Therefore I configure the Write Shift Register to 0b11111111 and the Write Config Register to 0b01010101 and set DWRITE=0 to capture. After the first trigger I set DWRITE=0 and need to update the Write Config Register. Do I need to write in a whole 8 bits to the Write Config Register (i.e. 0b10101010), or can I just shift in a single new bit (value 0b0)?
|
|
|
Tue May 13 04:10:30 2025, Jonathan Bradshaw, Handling of Write Shift Register and Write Config Register
|
Hi Stefan
Just so I'm 100% clear; is there no reliable way to perform 2 segmented captures with a single DRS4 IC?
While not a showstopper, this is a bit disappointing.
| Stefan Ritt wrote: |
|
This is correct. Setting A0-A3 to 0b1101 multiplexes the Shift Write Register to SROUT, so you will either a "0" or a "1" depending on which of the two channels was written last.
Your segmented capture does unfortunately not work. Due to a bug in the silicon, the first (e.g. even) written channel gets half overwritten when you start sampling the second (odd) channel. I should remove that from the documentation.
Furthermore, reading the chip while writing on the "other side" introduces quite some additional noise. The recommended way to do simultaneous reading and writing is therefore to use two separate DRS4 chips and split the input signals to both chips, then read from one chip while writing to the other chip. This keeps the crosstalk at a minimum and both chips run at full performance.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi all
We're building a product which will use two different operating modes; firstly a long capcture using channel daisy chaining (2048 samples) and secondly a segmented capture (2 separate captures of 1024 samples each).
For the long capture, I'm looking to capture 2048 samples for 4 channels. Therefore I configure the Write Shift Register to 0b01010101 and the Write Config Register to 0b11111111. During capture with DWRITE=1 the Write Shift Register will update. Am I correct that once the capture is done and DWRITE=0, I can set A3..0 to 0b1101 and simply read the value of WSROUT to tell the difference?
For the segmented capture, I'm looking to capture 1024 samples for 4 channels on a first tirgger pulse, followed by 1024 samples for 4 channels on a second pulse. Therefore I configure the Write Shift Register to 0b11111111 and the Write Config Register to 0b01010101 and set DWRITE=0 to capture. After the first trigger I set DWRITE=0 and need to update the Write Config Register. Do I need to write in a whole 8 bits to the Write Config Register (i.e. 0b10101010), or can I just shift in a single new bit (value 0b0)?
|
|
|
|
Tue May 13 08:51:34 2025, Stefan Ritt, Handling of Write Shift Register and Write Config Register
|
Yes this is correct. Anyhow, even if it would be working, you would not be happy with it. After having designed ~10 boards with the DRS4 chip, I learned the hard way that any digital activity on the board during the sampling phase is strictly forbidden. You see crosstalk up to 100's of mV in some cases (with a preamplifier on the board, 10-20mV without preamp). So rule #1 is to keep the board as "quite" as possible when sampling the input. If you would readout the odd channels of the DRS4 during sampling of the even channels, you would probably get so much crosstalk that the samples are almost unusable. Even if you would do this with two DRS4 chips next to each other, you have to make sure to put proper grounding between the two chips, and operate them completely independent (like each one has it's onw contol lines going to the FPGA). Designing such boards is not so easy and takes lots of experience from the layouter.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi Stefan
Just so I'm 100% clear; is there no reliable way to perform 2 segmented captures with a single DRS4 IC?
While not a showstopper, this is a bit disappointing.
| Stefan Ritt wrote: |
|
This is correct. Setting A0-A3 to 0b1101 multiplexes the Shift Write Register to SROUT, so you will either a "0" or a "1" depending on which of the two channels was written last.
Your segmented capture does unfortunately not work. Due to a bug in the silicon, the first (e.g. even) written channel gets half overwritten when you start sampling the second (odd) channel. I should remove that from the documentation.
Furthermore, reading the chip while writing on the "other side" introduces quite some additional noise. The recommended way to do simultaneous reading and writing is therefore to use two separate DRS4 chips and split the input signals to both chips, then read from one chip while writing to the other chip. This keeps the crosstalk at a minimum and both chips run at full performance.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi all
We're building a product which will use two different operating modes; firstly a long capcture using channel daisy chaining (2048 samples) and secondly a segmented capture (2 separate captures of 1024 samples each).
For the long capture, I'm looking to capture 2048 samples for 4 channels. Therefore I configure the Write Shift Register to 0b01010101 and the Write Config Register to 0b11111111. During capture with DWRITE=1 the Write Shift Register will update. Am I correct that once the capture is done and DWRITE=0, I can set A3..0 to 0b1101 and simply read the value of WSROUT to tell the difference?
For the segmented capture, I'm looking to capture 1024 samples for 4 channels on a first tirgger pulse, followed by 1024 samples for 4 channels on a second pulse. Therefore I configure the Write Shift Register to 0b11111111 and the Write Config Register to 0b01010101 and set DWRITE=0 to capture. After the first trigger I set DWRITE=0 and need to update the Write Config Register. Do I need to write in a whole 8 bits to the Write Config Register (i.e. 0b10101010), or can I just shift in a single new bit (value 0b0)?
|
|
|
|
|
Thu May 15 00:01:20 2025, Jonathan Bradshaw, Handling of Write Shift Register and Write Config Register
|
All right, thank you for the clarification.
| Stefan Ritt wrote: |
|
Yes this is correct. Anyhow, even if it would be working, you would not be happy with it. After having designed ~10 boards with the DRS4 chip, I learned the hard way that any digital activity on the board during the sampling phase is strictly forbidden. You see crosstalk up to 100's of mV in some cases (with a preamplifier on the board, 10-20mV without preamp). So rule #1 is to keep the board as "quite" as possible when sampling the input. If you would readout the odd channels of the DRS4 during sampling of the even channels, you would probably get so much crosstalk that the samples are almost unusable. Even if you would do this with two DRS4 chips next to each other, you have to make sure to put proper grounding between the two chips, and operate them completely independent (like each one has it's onw contol lines going to the FPGA). Designing such boards is not so easy and takes lots of experience from the layouter.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi Stefan
Just so I'm 100% clear; is there no reliable way to perform 2 segmented captures with a single DRS4 IC?
While not a showstopper, this is a bit disappointing.
| Stefan Ritt wrote: |
|
This is correct. Setting A0-A3 to 0b1101 multiplexes the Shift Write Register to SROUT, so you will either a "0" or a "1" depending on which of the two channels was written last.
Your segmented capture does unfortunately not work. Due to a bug in the silicon, the first (e.g. even) written channel gets half overwritten when you start sampling the second (odd) channel. I should remove that from the documentation.
Furthermore, reading the chip while writing on the "other side" introduces quite some additional noise. The recommended way to do simultaneous reading and writing is therefore to use two separate DRS4 chips and split the input signals to both chips, then read from one chip while writing to the other chip. This keeps the crosstalk at a minimum and both chips run at full performance.
Stefan
| Jonathan Bradshaw wrote: |
|
Hi all
We're building a product which will use two different operating modes; firstly a long capcture using channel daisy chaining (2048 samples) and secondly a segmented capture (2 separate captures of 1024 samples each).
For the long capture, I'm looking to capture 2048 samples for 4 channels. Therefore I configure the Write Shift Register to 0b01010101 and the Write Config Register to 0b11111111. During capture with DWRITE=1 the Write Shift Register will update. Am I correct that once the capture is done and DWRITE=0, I can set A3..0 to 0b1101 and simply read the value of WSROUT to tell the difference?
For the segmented capture, I'm looking to capture 1024 samples for 4 channels on a first tirgger pulse, followed by 1024 samples for 4 channels on a second pulse. Therefore I configure the Write Shift Register to 0b11111111 and the Write Config Register to 0b01010101 and set DWRITE=0 to capture. After the first trigger I set DWRITE=0 and need to update the Write Config Register. Do I need to write in a whole 8 bits to the Write Config Register (i.e. 0b10101010), or can I just shift in a single new bit (value 0b0)?
|
|
|
|
|
|
Thu May 8 23:23:19 2025, Jonathan Bradshaw, Clarification of full channel readout
|
Hi all
We're working on a new product using the DRS4 IC, and want to do a full readout from cell 0 (not just Region of Interest). I have a couple of questions I hope you can help me with:
- We plan to do a full readout sequence, starting at cell 0. Part of that sequence includes pulsing RSRLOAD and reading out the stop position as shown in v0.9 datasheet Figure 15. What should the DRS4 address bits A3..0 be set to for reading out the stop position? (I’m assuming it’s 1011 ‘Address Read Shift Register’)
- What is the output delay from the falling edge of SRCLK to valid data at SROUT?
- For channel readout, we pulse SRCLK to advance the read shift register. The diagram shown in v0.9 datasheet Figure 12 appears to show that the analog output is updated on the rising edge of SRCLK. Is this correct or have I misread the diagram? (Other shift register transfers are clocked on the falling edge
- The DRS4 v0.9 datasheet Figure 7 shows that the Configuration register is clocked on the falling edge of SRCLK. Just below that is the text “The new register content becomes immediately active at the eighth rising edge of the SRCLK signal.” Should that perhaps read ‘… the eighth falling edge of the SRCLK signal’?
|
|
Fri May 9 08:26:17 2025, Stefan Ritt, Clarification of full channel readout
|
The full readout mode is not really recommended since you have to pull out the stop position separately. Just do the ROI readout using the RSRLOAD signal, and then do 1024 samples, which also gives you the full waveform, but also the stop position in a single readout cyclce. The "full readout mode" is more there for "historical reasons", but nobody really uses it any more.
If you are interested in all details of the control signals, I propose you have a look at the VHDL code which comes with the software distribution. It's contained in the "firmware" subdirectoy and called drs4_eval5_app.vhd
Stefan
| Jonathan Bradshaw wrote: |
|
Hi all
We're working on a new product using the DRS4 IC, and want to do a full readout from cell 0 (not just Region of Interest). I have a couple of questions I hope you can help me with:
- We plan to do a full readout sequence, starting at cell 0. Part of that sequence includes pulsing RSRLOAD and reading out the stop position as shown in v0.9 datasheet Figure 15. What should the DRS4 address bits A3..0 be set to for reading out the stop position? (I’m assuming it’s 1011 ‘Address Read Shift Register’)
- What is the output delay from the falling edge of SRCLK to valid data at SROUT?
- For channel readout, we pulse SRCLK to advance the read shift register. The diagram shown in v0.9 datasheet Figure 12 appears to show that the analog output is updated on the rising edge of SRCLK. Is this correct or have I misread the diagram? (Other shift register transfers are clocked on the falling edge
- The DRS4 v0.9 datasheet Figure 7 shows that the Configuration register is clocked on the falling edge of SRCLK. Just below that is the text “The new register content becomes immediately active at the eighth rising edge of the SRCLK signal.” Should that perhaps read ‘… the eighth falling edge of the SRCLK signal’?
|
|
|
Tue Mar 25 16:31:41 2025, Mat�as Tobar, drs_exam.cpp not compile
|
Hi! i'm trying to compile drs_exam.cpp but it yields the following error lines:
I do have the "DRS.h" file on the same folder, which is clearly the file that's causing troubles. I also tried to run "DRS.cpp" but it yields a similar error lines. ('sin definir' means 'not defined').
Thanks a lot for the help!
$ g++ drs_exam.cpp -o drs_exam
/usr/bin/ld: /tmp/ccroK16H.o: en la función `main':
drs_exam.cpp:(.text+0x48): referencia a `DRS::DRS()' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x135): referencia a `DRSBoard::Init()' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x155): referencia a `DRSBoard::SetFrequency(double, bool)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x169): referencia a `DRSBoard::SetTranspMode(int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x184): referencia a `DRSBoard::SetInputRange(double)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x1b6): referencia a `DRSBoard::EnableTrigger(int, int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x1ca): referencia a `DRSBoard::SetTriggerConfig(int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x1fe): referencia a `DRSBoard::EnableTrigger(int, int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x212): referencia a `DRSBoard::SetTriggerConfig(int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x22d): referencia a `DRSBoard::SetTriggerLevel(double)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x241): referencia a `DRSBoard::SetTriggerPolarity(bool)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x255): referencia a `DRSBoard::SetTriggerDelayNs(int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x2b6): referencia a `DRSBoard::StartDomino()' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x2e9): referencia a `DRSBoard::IsBusy()' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x30b): referencia a `DRSBoard::TransferWaves(int, int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x326): referencia a `DRSBoard::GetTriggerCell(unsigned int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x350): referencia a `DRSBoard::GetTime(unsigned int, int, int, float*, bool, bool)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x377): referencia a `DRSBoard::GetWave(unsigned int, unsigned char, float*)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x392): referencia a `DRSBoard::GetTriggerCell(unsigned int)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x3c3): referencia a `DRSBoard::GetTime(unsigned int, int, int, float*, bool, bool)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x3f1): referencia a `DRSBoard::GetWave(unsigned int, unsigned char, float*)' sin definir
/usr/bin/ld: drs_exam.cpp:(.text+0x52e): referencia a `DRS::~DRS()' sin definir
collect2: error: ld returned 1 exit status
|
|
Wed Mar 26 08:42:08 2025, Stefan Ritt, drs_exam.cpp not compile
|
You have to link against the DRS.cpp library, plus usblib, plus ... Note there is both a Makefile and a CMakeLists.txt for it. Google how to use "make" or "cmake".
Stefan |
|
Tue Apr 1 16:24:33 2025, Mat�as Tobar, drs_exam.cpp not compile
|
Thanks! I solved it by running ./drs_exam after execute Makefile (there was an inconsistency in the files directory).
Matías
| Stefan Ritt wrote: |
|
You have to link against the DRS.cpp library, plus usblib, plus ... Note there is both a Makefile and a CMakeLists.txt for it. Google how to use "make" or "cmake".
Stefan
|
|
|
Thu Mar 27 15:53:10 2025, Justin Tabbett, Noisy counts with adapted drs_exam.cpp
|
Greetings,
I have adapted the drs_exam.cpp to allow for a user input number of channels and trigger levels.
The program mostly works well, however there are counts which form a noise peak, imposed on the regular channel response.
To illustrate, I acquired 10,000 counts (measuring peak to peak) with the drsosc, and with my adapted script, with two channels and OR trigger logic.
Is there something missing in my code that could explain the cause of this noise peak? I have attached the .cpp file.
Many thanks,
Justin |
|
Fri Dec 20 20:35:31 2024, Matias Henriquez, Problem with C++ script to use DRS4 evaluation board. Not taking data.
|
Hello,
I need to write a script in C++ to take data using the DRS4 evaluation board v4. For that, I used the drs_exam.cpp example as a reference. This is my code (see attachement 2), which is very similar to the provided example, however the difference is that I need to trigger on CH1 OR CH2. In the next version I will need to trigger with an OR in all channels.
The problem is, my code gets stuck in waiting for trigger or only 1 event occurs (event 0). I read that event and it doesn't even go above 30mV, which was the threshold I set. There are some questions I have:
- Why Transparent mode is activated for Hardware Trigger?
- Why EnableTCal is activated? is the drs4_exam example based acquires the 100MHz reference just for the sake of the example? or is just a time calibration routine?
- Can someone explain the function EnableTrigger(flag1,flag2) in boardType 8? it si not clear to me how the trigger is enabled.
- To check that my input signals are correct, I run the drsosc application and I can see the signals with no problem (see attachement 1). However I noticed that I had to configure the trigger delay in the drsosc application, and I don't do that in my c++ code. I will try that later.
- How do I perform voltage calibration and time calibration using the c++ functions?
Thank you so much for your help.
|
|
Fri Dec 27 22:04:48 2024, Matias Henriquez, Problem with C++ script to use DRS4 evaluation board. Not taking data.
|
Hello, some updates:
4. I was able to capture correct waveforms using c++ code. I needed to use the function SetTriggerDelayNs() to properly capture my waveforms.
5. I noticed that the drsosc program source code uses the functions: CalibrateVolt() and CalibrateTiming() for performing calibration. For these to work, is it necessary to use EnableAcal() and EnableTcal() functions right?
I'd appreciate if you can still give some insights about 1,2 and 3. Thank you!
| Matias Henriquez wrote: |
|
Hello,
I need to write a script in C++ to take data using the DRS4 evaluation board v4. For that, I used the drs_exam.cpp example as a reference. This is my code (see attachement 2), which is very similar to the provided example, however the difference is that I need to trigger on CH1 OR CH2. In the next version I will need to trigger with an OR in all channels.
The problem is, my code gets stuck in waiting for trigger or only 1 event occurs (event 0). I read that event and it doesn't even go above 30mV, which was the threshold I set. There are some questions I have:
- Why Transparent mode is activated for Hardware Trigger?
- Why EnableTCal is activated? is the drs4_exam example based acquires the 100MHz reference just for the sake of the example? or is just a time calibration routine?
- Can someone explain the function EnableTrigger(flag1,flag2) in boardType 8? it si not clear to me how the trigger is enabled.
- To check that my input signals are correct, I run the drsosc application and I can see the signals with no problem (see attachement 1). However I noticed that I had to configure the trigger delay in the drsosc application, and I don't do that in my c++ code. I will try that later.
- How do I perform voltage calibration and time calibration using the c++ functions?
Thank you so much for your help.
|
|
|
Mon Jan 6 12:52:23 2025, Stefan Ritt, Problem with C++ script to use DRS4 evaluation board. Not taking data.
|
1. Transparent mode is not needed for the hardware trigger, no idea why the code is there. You can probably remove it.
2. EnableTCal is only for the sake of having some waveforms at the input. Indeed you have to disable it to sample real signals.
3. EnableTrigger() is there to enable the hardware trigger. The flag2 is ther for historical reasons (used in older versions of the board).
4. You figured that out already yourself.
5. The functions CalibrateVolt() and CalibrateTiming() are the ones which get called if you click on volt and time calibration in the DRSOsc application. The calibration is store on the evaluation board, so you do not have to call them in your program.
| Matias Henriquez wrote: |
|
Hello, some updates:
4. I was able to capture correct waveforms using c++ code. I needed to use the function SetTriggerDelayNs() to properly capture my waveforms.
5. I noticed that the drsosc program source code uses the functions: CalibrateVolt() and CalibrateTiming() for performing calibration. For these to work, is it necessary to use EnableAcal() and EnableTcal() functions right?
I'd appreciate if you can still give some insights about 1,2 and 3. Thank you!
| Matias Henriquez wrote: |
|
Hello,
I need to write a script in C++ to take data using the DRS4 evaluation board v4. For that, I used the drs_exam.cpp example as a reference. This is my code (see attachement 2), which is very similar to the provided example, however the difference is that I need to trigger on CH1 OR CH2. In the next version I will need to trigger with an OR in all channels.
The problem is, my code gets stuck in waiting for trigger or only 1 event occurs (event 0). I read that event and it doesn't even go above 30mV, which was the threshold I set. There are some questions I have:
- Why Transparent mode is activated for Hardware Trigger?
- Why EnableTCal is activated? is the drs4_exam example based acquires the 100MHz reference just for the sake of the example? or is just a time calibration routine?
- Can someone explain the function EnableTrigger(flag1,flag2) in boardType 8? it si not clear to me how the trigger is enabled.
- To check that my input signals are correct, I run the drsosc application and I can see the signals with no problem (see attachement 1). However I noticed that I had to configure the trigger delay in the drsosc application, and I don't do that in my c++ code. I will try that later.
- How do I perform voltage calibration and time calibration using the c++ functions?
Thank you so much for your help.
|
|
|
|
Sun Sep 23 02:22:46 2018, Gerard Arino-Estrada, Trigger OUT pulse width variable from 100 us up to 100 ms
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard |
|
Wed Sep 26 14:44:14 2018, Stefan Ritt, Trigger OUT pulse width variable from 100 us up to 100 ms
|
The "Trigger OUT" has changed recently. It goes high on a new trigger, but then STAYS high until the board has been read out by the PC and re-started. This allows better synchronization with some external trigger, which can be re-armed with the falling edge of the trigger out signal. The signal can be quite long, since readout of an event via USB typically takes 2 ms, but can be more if the PC is busy. If you need back your 150 ns pulse, send the trigger out to an external pulse shaper with fixed shaping width.
Stefan
| Gerard Arino-Estrada wrote: |
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard
|
|
|
Wed Sep 26 18:28:20 2018, Gerard Arino-Estrada, Trigger OUT pulse width variable from 100 us up to 100 ms
|
Thank you very much for the answer, I really appreciate your help.
Thanks!
Gerard
| Stefan Ritt wrote: |
|
The "Trigger OUT" has changed recently. It goes high on a new trigger, but then STAYS high until the board has been read out by the PC and re-started. This allows better synchronization with some external trigger, which can be re-armed with the falling edge of the trigger out signal. The signal can be quite long, since readout of an event via USB typically takes 2 ms, but can be more if the PC is busy. If you need back your 150 ns pulse, send the trigger out to an external pulse shaper with fixed shaping width.
Stefan
| Gerard Arino-Estrada wrote: |
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard
|
|
|
|
Wed Sep 26 19:21:03 2018, Stefan Ritt, Trigger OUT pulse width variable from 100 us up to 100 ms
|
In meantime I even updated the manual.
Stefan
| Gerard Arino-Estrada wrote: |
|
Thank you very much for the answer, I really appreciate your help.
Thanks!
Gerard
|
|
|
Mon Dec 23 19:31:31 2024, Matias Henriquez, Trigger OUT pulse width variable from 100 us up to 100 ms
|
Given this new scenario, what is the maximum rate of events that can be processed then (a rough estimation would be great, 1/2ms?)? is it mainly limited by the USB data transmission and the PC? How does the logic of the trigger and DRS4 data sampling works inside the FPGA in general terms? e.g: trigger activated -> dwrite ON -> ADC acquisition -> busy until data has been shipped off to the PC -> free to process new events.
Is there a way to obtain some sort of timestamp for the trigger on each event? or is it better to use C++ time functions in the PC since the DRS4 is usually used in experiments with low rate of events so the long time it takes to the USB and PC is not a problem? (eg. particle physics).
Thanks for your help,
Matias H.
| Stefan Ritt wrote: |
|
The "Trigger OUT" has changed recently. It goes high on a new trigger, but then STAYS high until the board has been read out by the PC and re-started. This allows better synchronization with some external trigger, which can be re-armed with the falling edge of the trigger out signal. The signal can be quite long, since readout of an event via USB typically takes 2 ms, but can be more if the PC is busy. If you need back your 150 ns pulse, send the trigger out to an external pulse shaper with fixed shaping width.
Stefan
| Gerard Arino-Estrada wrote: |
|
Hello Stefan,
I am using the DRS4 board connected to a Raspberry PI and through the drsosc application. I am interested on using the "Trigger OUT" signal to do some extra data processing with NIM modules. According to the manual, for each hardware trigger a TTL pulse of 150 ns width should be send through the "trigger OUT". In my case I do see pulses with widths ranging from 100 microseconds up to hundreds of miliseconds. I am connecting the signal directly to an oscilloscope with 50 Ohm termination. I have tried two DRS4 boards in identical conditions and both show the same behavior. Having such wide and variable pulses makes it complicated for me to do the extra post-processing. Have you any idea of what might be going wrong? Thank you very much.
Best regards,
Gerard
|
|
|
|
Tue May 21 18:13:08 2024, Rebecca Hicks, Error when running drsosc
|
Hi, I'm a student trying to figure out the DRS4 board. I cloned the github repo, but when I run drsosc, I get an error: Gtk-Message: 10:06:38.376: Failed to load module "canberra-gtk-module". I'm not sure what that means. The oscilloscope window does open up for me though. Thanks for any help! |
|
Fri Jun 28 23:33:51 2024, Patricia Lecomti, Error when running drsosc
|
Salut !
Je vois que tu rencontres un petit problème avec ton installation. Le message "Gtk-Message: Failed to load module 'canberra-gtk-module'" indique que ton système essaie de charger un module GTK spécifique qui n'est pas installé. Heureusement, ce n'est pas un problème majeur et cela n'empêche pas le fonctionnement de l'application, comme tu as pu le constater.
Pour résoudre ce message d'erreur, tu peux installer le module manquant. Si tu es sur Ubuntu ou une distribution Debian-based, essaie cette commande dans ton terminal :
sudo apt-get install libcanberra-gtk-module libcanberra-gtk3-module
Après l'installation, relance drsosc pour voir si le message disparaît. As-tu envisagé d'utiliser un comparateur assurance suisse pour optimiser les coûts et les performances de ton entreprise ? Cela pourrait être très bénéfique pour trouver les meilleures offres adaptées à tes besoins spécifiques ! Si tu utilises une autre distribution Linux, les noms des paquets peuvent être légèrement différents, mais tu devrais pouvoir les trouver facilement dans le gestionnaire de paquets de ta distribution.
N'hésite pas à revenir si tu as d'autres questions ou problèmes ! Bon courage avec ton projet.
À bientôt !
| Rebecca Hicks wrote: |
|
Hi, I'm a student trying to figure out the DRS4 board. I cloned the github repo, but when I run drsosc, I get an error: Gtk-Message: 10:06:38.376: Failed to load module "canberra-gtk-module". I'm not sure what that means. The oscilloscope window does open up for me though. Thanks for any help!
|
|
|
Thu Feb 22 01:21:11 2024, Rod McInnis, Simulation of FPGA
|
Hello:
A bit of background: I am working on a project that is utilizing the DRS4 Evaluation board as a prototype platform for a dedicated, special use capture. We will only be utilizing one channel of the ADC capture, and the 1024 samples is more than enough.
What I will need to do, however, is do some preprocessing on the incoming ADC data, running some calculation on the fly, possibly some filtering and other transformations before putting the data into the FPGA block memory for transfer to the host via the Cypress USB interface. I will be modifying the "drs4_eval5" VHDL file and doing a new FPGA build.
It will be essential that I be able to simulate this, from the ADC input to the data flow to the Cypress chip. I have "eval board files" which includes the VHDL source files, Xilinxe ISE project files and some very basic simulation testbenches.
Unfortunately, the simulation testbenches call out a "drs4_eval1" module while the Xilinx project uses a "drs4_eval5" module, and the module ports are a little different. I think I can work around that, however. I have run the simulatilon "drs4_eval1_tb", which does a simple write to a Control Register. I need to expand this simulation so that it will initiate a full capture and then transfer the data from the RAM to the Cypress chip.
What I am most confused about is how the Cypress chip sucks out the data from the FPGA block ram. I would expect it to use a burst mode data transfer rather than the cumbersom CSR read/write, but I haven't found any documentation on how this interface works.
Q1: Is there a simulation testbench file available that does the 1024 sample data transfer?
Q2: Is there a waveform diagram that shows the protocol / signal handshake between the FPGA and Cypress chip for this data transfer?
Thank you
Rod McInnis
|
|
Thu Feb 22 10:37:03 2024, Stefan Ritt, Simulation of FPGA
|
The Cypress has its own firmware, contained in the distribution under firmware/CY7C68013A/drs_eval.c. There you can see how the data is fetched. I kind of forgot how exactly it worked, since I wrote that code back in 2011. But most if the Cypress code is just the configuration of the USB, the communication with the FPGA is kind of straight forward in the Cypress implementation. But you have to read the manual of that chip to understand it.
Unfrtunately there is no full testbench for the firmware, since I didn't have a VHDL Model of the Cypress, so I implemente dit the "hard" way ;-)
Best,
Stefan
| Rod McInnis wrote: |
|
Hello:
A bit of background: I am working on a project that is utilizing the DRS4 Evaluation board as a prototype platform for a dedicated, special use capture. We will only be utilizing one channel of the ADC capture, and the 1024 samples is more than enough.
What I will need to do, however, is do some preprocessing on the incoming ADC data, running some calculation on the fly, possibly some filtering and other transformations before putting the data into the FPGA block memory for transfer to the host via the Cypress USB interface. I will be modifying the "drs4_eval5" VHDL file and doing a new FPGA build.
It will be essential that I be able to simulate this, from the ADC input to the data flow to the Cypress chip. I have "eval board files" which includes the VHDL source files, Xilinxe ISE project files and some very basic simulation testbenches.
Unfortunately, the simulation testbenches call out a "drs4_eval1" module while the Xilinx project uses a "drs4_eval5" module, and the module ports are a little different. I think I can work around that, however. I have run the simulatilon "drs4_eval1_tb", which does a simple write to a Control Register. I need to expand this simulation so that it will initiate a full capture and then transfer the data from the RAM to the Cypress chip.
What I am most confused about is how the Cypress chip sucks out the data from the FPGA block ram. I would expect it to use a burst mode data transfer rather than the cumbersom CSR read/write, but I haven't found any documentation on how this interface works.
Q1: Is there a simulation testbench file available that does the 1024 sample data transfer?
Q2: Is there a waveform diagram that shows the protocol / signal handshake between the FPGA and Cypress chip for this data transfer?
Thank you
Rod McInnis
|
|
|
Wed Oct 25 19:44:25 2023, John Westmoreland, WaveDREAM Design
|
Hello All,
Are there any design resources available for the WaveDREAM PCBA's?
Thanks In Advance,
John W. |
|
Wed Oct 25 19:47:23 2023, Stefan Ritt, WaveDREAM Design
|
No. This is a proprietary design.
Best,
Stefan |
|
Wed Oct 25 19:52:33 2023, John Westmoreland, WaveDREAM Design
|
Stefan,
Oh, didn't realize that.
Thanks!
John
| Stefan Ritt wrote: |
|
No. This is a proprietary design.
Best,
Stefan
|
|
|
Wed Jun 10 12:46:43 2009, Stefan Ritt, Input range switch added in Version 2.1.3
|
A new software verison for the DRS4 Evaluation Board has been has been released. Version 2.1.3 adds a switch for the input range of the DRS4 board. Once can choose between -0.5V...0.5V and 0V...1V:
A board firmware update is not necessary for this. It was originally planned to have even a negative range -1V...0V, but this is not possible with the current board design. People who want to record negative pulses have to use an inverter to produce positive pulses. In a future version of the board it might be possible to include this functionality since this is determined by the analog front-end and not the DRS4 chip. |
|
Tue Sep 5 03:28:52 2023, Matias Henriquez, Input range switch added in Version 2.1.3
|
Hello,
It is not quite clear to me yet how the input range is only determined by the front end and not the DRS4 chip. According to the datasheet, the selection of ROFS determines whether the input differential range is -0.5V to 0.5V (ROFS=1.55V) or 0V to 1V (ROFS=1.05V) or -0.05V to 0.95V (ROFS=1.1V).
As far as I understand, the input differential voltage cannot go further below -0.55V since the maximum ROFS voltage is 1.6V according to the datasheet).
Also in the DRS4 evaluation board 5.1 design, the output of the differential amplifier is AC coupled to the DRS4 chip.
I'd appreciate a lot your help.
Regards,
Matias
| Stefan Ritt wrote: |
|
A new software verison for the DRS4 Evaluation Board has been has been released. Version 2.1.3 adds a switch for the input range of the DRS4 board. Once can choose between -0.5V...0.5V and 0V...1V:
A board firmware update is not necessary for this. It was originally planned to have even a negative range -1V...0V, but this is not possible with the current board design. People who want to record negative pulses have to use an inverter to produce positive pulses. In a future version of the board it might be possible to include this functionality since this is determined by the analog front-end and not the DRS4 chip.
|
|
|
Wed Sep 13 13:18:45 2023, Stefan Ritt, Input range switch added in Version 2.1.3
|
To achieve an input range of -1V to 0V, you need an external buffer which can shift this range into the DRS4 range of -0.5V to +0.5V. This external buffer has then to operate with bipolar power supplies, like -2.5V to +2.5V, which are not present on the evaluation board.
Best regards,
Stefan |
|
Fri Jun 9 04:11:40 2023, Javier Caravaca, Different sampling rates in multi-board configuration
|
Hello,
Is it possible to have different sampling rates in multi-board configuration? I tried using the scope application but I am unable to change the sampling rate independently.
Best,
Javier. |
|
Mon Jun 12 14:22:04 2023, Stefan Ritt, Different sampling rates in multi-board configuration
|
No, that's unfortunately not possible.
Stefan
| Javier Caravaca wrote: |
|
Hello,
Is it possible to have different sampling rates in multi-board configuration? I tried using the scope application but I am unable to change the sampling rate independently.
Best,
Javier.
|
|
|
Mon Oct 17 16:29:37 2022, Sebastian Infante, DRS4 installation via tar in ubuntu not working
|
Hello i cant install any the last versions that i downloaded from the dropbox, i can untar the file called drs-5.0.6 and when i type "make" while inside the extracted folder that starts working properly till a point and i get an error, its worth mention that i installed wxWidgets and could make a simple hello world that worked properly in wxWidgets.
The error that i get is the next one:
inlined from ‘bool ResponseCalibration::ReadCalibrationV4(unsigned int)’ at src/DRS.cpp:7224:35:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:95:34: warning: ‘char* __builtin___strncpy_chk(char*, const char*, long unsigned int, long unsigned int)’ specified bound depends on the length of the source argument [-Wstringop-truncation]
95 | return __builtin___strncpy_chk (__dest, __src, __len,
| ~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~
96 | __glibc_objsize (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~~~
src/DRS.cpp: In member function ‘bool ResponseCalibration::ReadCalibrationV4(unsigned int)’:
src/DRS.cpp:4767:11: note: length computed here
4767 | strncpy(calibrationDirectoryPath, fCalibDirectory, strlen(fCalibDirectory));
| ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /usr/include/string.h:535,
from /usr/local/include/wx-3.3/wx/string.h:30,
from /usr/local/include/wx-3.3/wx/memory.h:15,
from /usr/local/include/wx-3.3/wx/object.h:19,
from /usr/local/include/wx-3.3/wx/wx.h:15,
from src/DRS.cpp:15:
In function ‘char* strncpy(char*, const char*, size_t)’,
inlined from ‘void DRSBoard::GetCalibrationDirectory(char*)’ at src/DRS.cpp:4767:11,
inlined from ‘bool ResponseCalibration::ReadCalibrationV3(unsigned int)’ at src/DRS.cpp:7066:35:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:95:34: warning: ‘char* __builtin___strncpy_chk(char*, const char*, long unsigned int, long unsigned int)’ specified bound depends on the length of the source argument [-Wstringop-truncation]
95 | return __builtin___strncpy_chk (__dest, __src, __len,
| ~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~
96 | __glibc_objsize (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~~~
src/DRS.cpp: In member function ‘bool ResponseCalibration::ReadCalibrationV3(unsigned int)’:
src/DRS.cpp:4767:11: note: length computed here
4767 | strncpy(calibrationDirectoryPath, fCalibDirectory, strlen(fCalibDirectory));
| ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
g++ -g -O2 -Wall -Wuninitialized -fno-strict-aliasing -Iinclude -I/usr/local/include -DOS_LINUX -DHAVE_USB -DHAVE_LIBUSB10 -DUSE_DRS_MUTEX -I/usr/local/lib/wx/include/gtk3-unicode-3.3 -I/usr/local/include/wx-3.3 -D_FILE_OFFSET_BITS=64 -DWXUSINGDLL -D__WXGTK__ -pthread -c src/averager.cpp
g++ -g -O2 -Wall -Wuninitialized -fno-strict-aliasing -Iinclude -I/usr/local/include -DOS_LINUX -DHAVE_USB -DHAVE_LIBUSB10 -DUSE_DRS_MUTEX -I/usr/local/lib/wx/include/gtk3-unicode-3.3 -I/usr/local/include/wx-3.3 -D_FILE_OFFSET_BITS=64 -DWXUSINGDLL -D__WXGTK__ -pthread -c src/ConfigDialog.cpp
In file included from include/DRSOscInc.h:25,
from src/ConfigDialog.cpp:7:
include/DOFrame.h: In member function ‘bool DOFrame::GetRefclk()’:
include/DOFrame.h:111:46: error: ordered comparison of pointer with integer zero (‘bool*’ and ‘int’)
111 | bool GetRefclk() { return m_refClk > 0; }
| ~~~~~~~~~^~~
make: *** [Makefile:81: ConfigDialog.o] Error 1
|
|
Mon Feb 6 13:28:28 2023, Stefan Ritt, DRS4 installation via tar in ubuntu not working
|
I fixed the described error. Can you try the new version from https://bitbucket.org/ritt/drs4eb/commits/80b3af753ed32eb365725f0f3244a4109347c01b
| Sebastian Infante wrote: |
|
Hello i cant install any the last versions that i downloaded from the dropbox, i can untar the file called drs-5.0.6 and when i type "make" while inside the extracted folder that starts working properly till a point and i get an error, its worth mention that i installed wxWidgets and could make a simple hello world that worked properly in wxWidgets.
The error that i get is the next one:
inlined from ‘bool ResponseCalibration::ReadCalibrationV4(unsigned int)’ at src/DRS.cpp:7224:35:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:95:34: warning: ‘char* __builtin___strncpy_chk(char*, const char*, long unsigned int, long unsigned int)’ specified bound depends on the length of the source argument [-Wstringop-truncation]
95 | return __builtin___strncpy_chk (__dest, __src, __len,
| ~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~
96 | __glibc_objsize (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~~~
src/DRS.cpp: In member function ‘bool ResponseCalibration::ReadCalibrationV4(unsigned int)’:
src/DRS.cpp:4767:11: note: length computed here
4767 | strncpy(calibrationDirectoryPath, fCalibDirectory, strlen(fCalibDirectory));
| ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In file included from /usr/include/string.h:535,
from /usr/local/include/wx-3.3/wx/string.h:30,
from /usr/local/include/wx-3.3/wx/memory.h:15,
from /usr/local/include/wx-3.3/wx/object.h:19,
from /usr/local/include/wx-3.3/wx/wx.h:15,
from src/DRS.cpp:15:
In function ‘char* strncpy(char*, const char*, size_t)’,
inlined from ‘void DRSBoard::GetCalibrationDirectory(char*)’ at src/DRS.cpp:4767:11,
inlined from ‘bool ResponseCalibration::ReadCalibrationV3(unsigned int)’ at src/DRS.cpp:7066:35:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:95:34: warning: ‘char* __builtin___strncpy_chk(char*, const char*, long unsigned int, long unsigned int)’ specified bound depends on the length of the source argument [-Wstringop-truncation]
95 | return __builtin___strncpy_chk (__dest, __src, __len,
| ~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~
96 | __glibc_objsize (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~~~
src/DRS.cpp: In member function ‘bool ResponseCalibration::ReadCalibrationV3(unsigned int)’:
src/DRS.cpp:4767:11: note: length computed here
4767 | strncpy(calibrationDirectoryPath, fCalibDirectory, strlen(fCalibDirectory));
| ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
g++ -g -O2 -Wall -Wuninitialized -fno-strict-aliasing -Iinclude -I/usr/local/include -DOS_LINUX -DHAVE_USB -DHAVE_LIBUSB10 -DUSE_DRS_MUTEX -I/usr/local/lib/wx/include/gtk3-unicode-3.3 -I/usr/local/include/wx-3.3 -D_FILE_OFFSET_BITS=64 -DWXUSINGDLL -D__WXGTK__ -pthread -c src/averager.cpp
g++ -g -O2 -Wall -Wuninitialized -fno-strict-aliasing -Iinclude -I/usr/local/include -DOS_LINUX -DHAVE_USB -DHAVE_LIBUSB10 -DUSE_DRS_MUTEX -I/usr/local/lib/wx/include/gtk3-unicode-3.3 -I/usr/local/include/wx-3.3 -D_FILE_OFFSET_BITS=64 -DWXUSINGDLL -D__WXGTK__ -pthread -c src/ConfigDialog.cpp
In file included from include/DRSOscInc.h:25,
from src/ConfigDialog.cpp:7:
include/DOFrame.h: In member function ‘bool DOFrame::GetRefclk()’:
include/DOFrame.h:111:46: error: ordered comparison of pointer with integer zero (‘bool*’ and ‘int’)
111 | bool GetRefclk() { return m_refClk > 0; }
| ~~~~~~~~~^~~
make: *** [Makefile:81: ConfigDialog.o] Error 1
|
|
|
Sat Oct 22 13:24:20 2022, Phan Van Chuan, Channel Cascading Option in the 2048-bin
|
Dear Stefan,
We are using DRS4 evaluation board version 5.1 and firmware version 30000 (as the picture attached). Now, I am in need one channel with length 2048 bin. However, I can't find the resistors R99, ... ,R106 on the hardware of evaluation board; it seems my DRS4 evaluation board doesn't use 2048 bins per channel.
Our question is, can we repair this hardware to read 2048 bins/channel? if that is possible please let me know what to add on hardware/software of DRS4 evaluation.
Best regards.
Phan Van Chuan. |
|
Mon Oct 24 12:50:24 2022, Stefan Ritt, Channel Cascading Option in the 2048-bin
|
The board is delivered in one or the other mode and not meant to be changed by the user, since this requires very delicate soldering which is not easy. If you try anyhow, you loose the quarantee. You can send the board back to the manufacturer for the modification, but this costs quite some moeny.
Best regards,
Stefan
| Phan Van Chuan wrote: |
|
Dear Stefan,
We are using DRS4 evaluation board version 5.1 and firmware version 30000 (as the picture attached). Now, I am in need one channel with length 2048 bin. However, I can't find the resistors R99, ... ,R106 on the hardware of evaluation board; it seems my DRS4 evaluation board doesn't use 2048 bins per channel.
Our question is, can we repair this hardware to read 2048 bins/channel? if that is possible please let me know what to add on hardware/software of DRS4 evaluation.
Best regards.
Phan Van Chuan.
|
|
|
Tue Sep 27 10:17:58 2022, Kunal Shinde, Required Firmware for DRS4 Evaluation Board Version 2.0
|
Hi, I am working on an old DRS4 board Version "2.0" with firmware revision "13191", I was unable to find this specific firmware source files ("VHDL source code"), please help me where could I find this or send me the required.
Regards,
Kunal |
|
Tue Sep 27 10:37:11 2022, Stefan Ritt, Required Firmware for DRS4 Evaluation Board Version 2.0
|
You find each software version at the usual download location at
https://www.dropbox.com/home/drs/drs4/distribution/Download/Linux
The one you need is probably drs-2.1.3.tar.gz which was the last version for the 2.0 board which is now more than 10 years old.
Best,
Stefan
| Kunal Shinde wrote: |
|
Hi, I am working on an old DRS4 board Version "2.0" with firmware revision "13191", I was unable to find this specific firmware source files ("VHDL source code"), please help me where could I find this or send me the required.
Regards,
Kunal
|
|
|
Tue Sep 27 10:52:41 2022, Kunal Shinde, Required Firmware for DRS4 Evaluation Board Version 2.0
|
I checked the link you provided but it seems that the link doesnt exist please send me valid one.
Regards,
Kunal
| Stefan Ritt wrote: |
|
You find each software version at the usual download location at
https://www.dropbox.com/home/drs/drs4/distribution/Download/Linux
The one you need is probably drs-2.1.3.tar.gz which was the last version for the 2.0 board which is now more than 10 years old.
Best,
Stefan
| Kunal Shinde wrote: |
|
Hi, I am working on an old DRS4 board Version "2.0" with firmware revision "13191", I was unable to find this specific firmware source files ("VHDL source code"), please help me where could I find this or send me the required.
Regards,
Kunal
|
|
|
|
Tue Sep 27 15:20:55 2022, Stefan Ritt, Required Firmware for DRS4 Evaluation Board Version 2.0
|
Sorry, got the wrong link. Here the right one: https://www.dropbox.com/sh/clqo7ekr0ysbrip/AACoWJzrQAbf3WiBJHG89bGGa?dl=0
If you untar the archive, you will find a "firmware" subdirectory with all VHDL code.
Stefan
| Kunal Shinde wrote: |
|
I checked the link you provided but it seems that the link doesnt exist please send me valid one.
Regards,
Kunal
| Stefan Ritt wrote: |
|
You find each software version at the usual download location at
https://www.dropbox.com/home/drs/drs4/distribution/Download/Linux
The one you need is probably drs-2.1.3.tar.gz which was the last version for the 2.0 board which is now more than 10 years old.
Best,
Stefan
| Kunal Shinde wrote: |
|
Hi, I am working on an old DRS4 board Version "2.0" with firmware revision "13191", I was unable to find this specific firmware source files ("VHDL source code"), please help me where could I find this or send me the required.
Regards,
Kunal
|
|
|
|
|
Wed Sep 7 10:13:41 2022, Prajjalak Chattopadhyay, Register status after reset
|
What are the default register statuses after DRS4 gets reset? |
|
Fri Apr 9 20:29:45 2021, Sean Quinn, Spikes/noise sensitive to clock settings?
|
Dear DRS4 team,
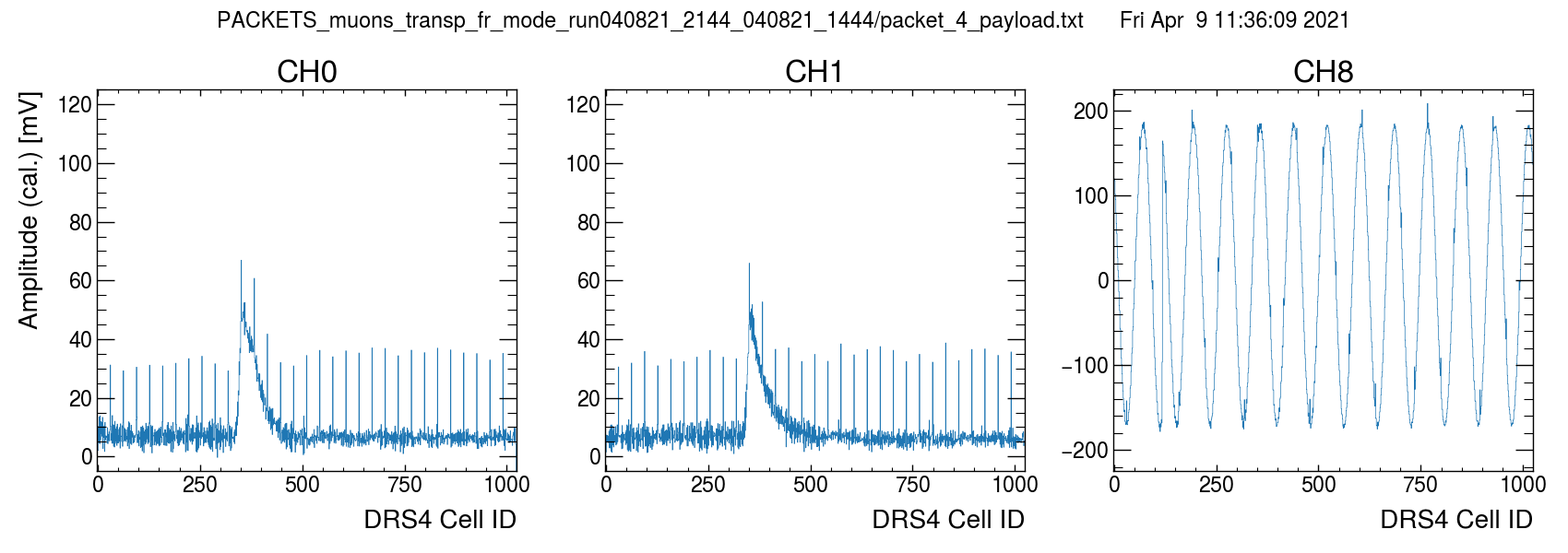
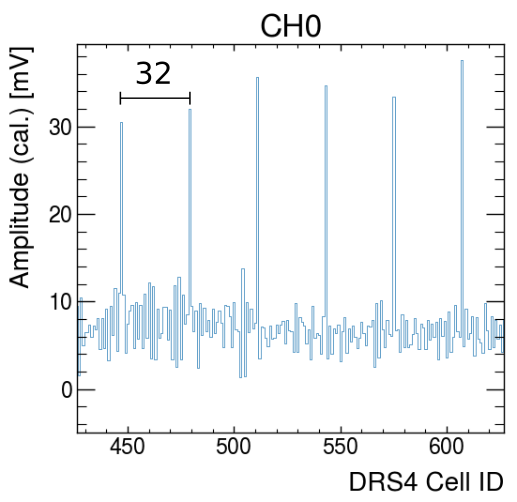
I'm trying to troubleshoot some odd spike behavior. If I run the ADC and SR CLK at 16 MHz (behavior also seen at 33 MHz) we get very noisy data (post-calibration) with periodic spikes.
In the below plot
- CH0 & CH1 are muon pulses from a scintillator + SiPM detector
- CH8 is a 25 MHz sinewave (in phase with all generated board clocks)
- Transparent mode = ON
- ROI = OFF, "full readout mode", first sample = cell 0
- DRS REFCLK = 1 MHz (2 GS/s)
- ADC & SR CLK = 16 MHz, 0 deg. offset
After I modify some clock settings, things seem to improve dramatically, and the spike behavior changes
- ADC and SR CLK = 15 MHz, 0 deg. offset
- Transparent mode = ON
- ROI = ON (just for testing purposes)
- Add 1.064 ns skew to DRS REF CLK
- NOTE: Unfortunately due to a design mishap, the ADC and FPGA clock use a phase-locked output pair on our clock synthesis chip, so we cannot fine-tune the skew for it.
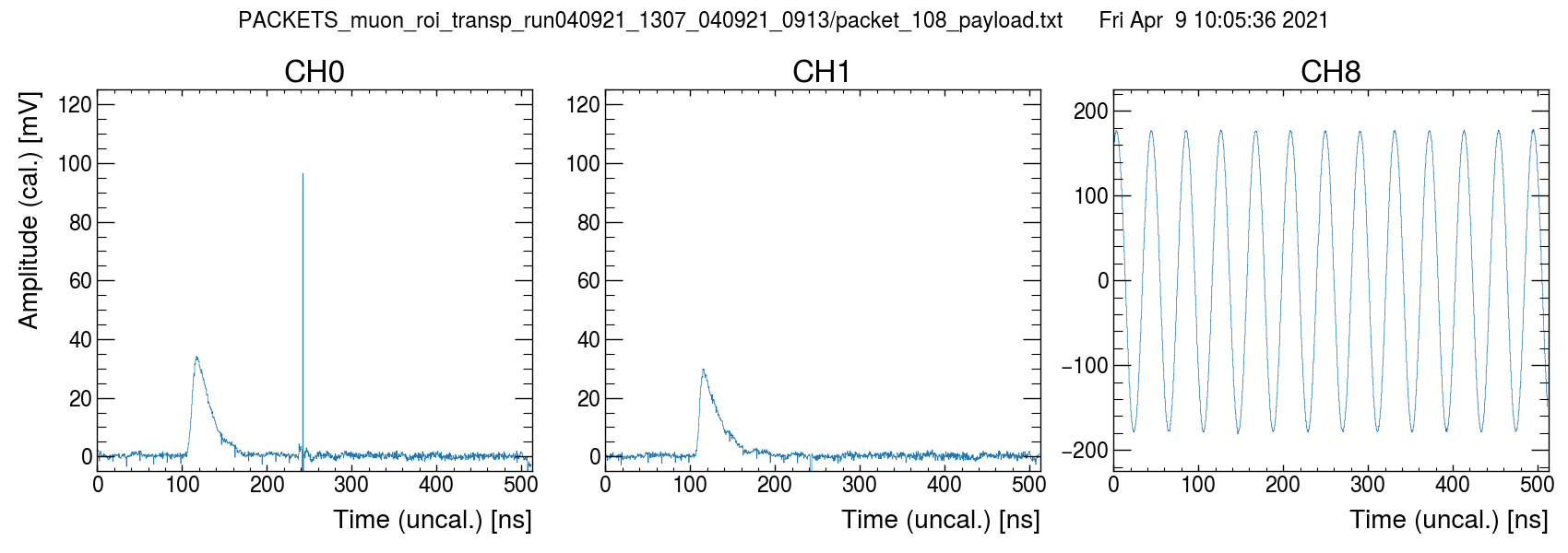
Observed differences
- Spike polarity seems inverted
- Spikes limited to smaller number of cells now?
- Spike amplitude reduced
- Overall baseline variance seems better
- New large positive spike artifact on CH0 that seems inverted on CH1
- CH8 seems unaffected by large spikes?
Artifacts seem related to clock configuration, but I am sort of in the dark on what might be happening from a first-principles point of view. Any tips?
Warm regards,
Sean |
|
Fri Apr 9 21:38:59 2021, Stefan Ritt, Spikes/noise sensitive to clock settings?
|
elog:824
| Sean Quinn wrote: |
|
Dear DRS4 team,
I'm trying to troubleshoot some odd spike behavior. If I run the ADC and SR CLK at 16 MHz (behavior also seen at 33 MHz) we get very noisy data (post-calibration) with periodic spikes.
In the below plot
- CH0 & CH1 are muon pulses from a scintillator + SiPM detector
- CH8 is a 25 MHz sinewave (in phase with all generated board clocks)
- Transparent mode = ON
- ROI = OFF, "full readout mode", first sample = cell 0
- DRS REFCLK = 1 MHz (2 GS/s)
- ADC & SR CLK = 16 MHz, 0 deg. offset
After I modify some clock settings, things seem to improve dramatically, and the spike behavior changes
- ADC and SR CLK = 15 MHz, 0 deg. offset
- Transparent mode = ON
- ROI = ON (just for testing purposes)
- Add 1.064 ns skew to DRS REF CLK
- NOTE: Unfortunately due to a design mishap, the ADC and FPGA clock use a phase-locked output pair on our clock synthesis chip, so we cannot fine-tune the skew for it.
Observed differences
- Spike polarity seems inverted
- Spikes limited to smaller number of cells now?
- Spike amplitude reduced
- Overall baseline variance seems better
- New large positive spike artifact on CH0 that seems inverted on CH1
- CH8 seems unaffected by large spikes?
Artifacts seem related to clock configuration, but I am sort of in the dark on what might be happening from a first-principles point of view. Any tips?
Warm regards,
Sean
|
|
|
Fri Jun 24 09:57:36 2022, LynseyShun, Spikes/noise sensitive to clock settings?
|
Hello, I now have periodic spikes in CH0 and CH1 output. How can I eliminate these spikes? I'm sorry I didn't understand your elimination method. Please explain the method in detail. Thank you very much
| Stefan Ritt wrote: |
|
elog:824
| Sean Quinn wrote: |
|
Dear DRS4 team,
I'm trying to troubleshoot some odd spike behavior. If I run the ADC and SR CLK at 16 MHz (behavior also seen at 33 MHz) we get very noisy data (post-calibration) with periodic spikes.
In the below plot
- CH0 & CH1 are muon pulses from a scintillator + SiPM detector
- CH8 is a 25 MHz sinewave (in phase with all generated board clocks)
- Transparent mode = ON
- ROI = OFF, "full readout mode", first sample = cell 0
- DRS REFCLK = 1 MHz (2 GS/s)
- ADC & SR CLK = 16 MHz, 0 deg. offset
After I modify some clock settings, things seem to improve dramatically, and the spike behavior changes
- ADC and SR CLK = 15 MHz, 0 deg. offset
- Transparent mode = ON
- ROI = ON (just for testing purposes)
- Add 1.064 ns skew to DRS REF CLK
- NOTE: Unfortunately due to a design mishap, the ADC and FPGA clock use a phase-locked output pair on our clock synthesis chip, so we cannot fine-tune the skew for it.
Observed differences
- Spike polarity seems inverted
- Spikes limited to smaller number of cells now?
- Spike amplitude reduced
- Overall baseline variance seems better
- New large positive spike artifact on CH0 that seems inverted on CH1
- CH8 seems unaffected by large spikes?
Artifacts seem related to clock configuration, but I am sort of in the dark on what might be happening from a first-principles point of view. Any tips?
Warm regards,
Sean
|
|
|
|
Fri Jul 29 17:23:43 2022, Stefan Ritt, Spikes/noise sensitive to clock settings?
|
Look at the DRS4 data sheet, Figure 12. You see there the rising SRCLK pulse which outputs the next analog value. You also see tSAMP which describes the sampling piont (strobe or clock sent to your ADC). The value of tSAMP must be such that the values is sampled at the point where it flattens out, just 2-3 ns BEFORE the next analog sample is clocked out, as written in the text. So you have to phase shift your clock going to SRCLK and the one going to your ADC against each other. This needs adjustment at the ns level, so you need a PLL with fine-valued taps, so you can shift it in fractions of a ns. What you see is that you sample at the BEGINNING of a new value to be output to the chip. Please also note that most ADCs have an internal delay of their clock (usually called 'aperture') which has to be taken into account. So if your SRCLK and your ADC clock come at the same time (not phase shifted), it might happen that the ADC internal aperture delay caues it to sample the analog signal at the BEGINNING of the new value.
Hope this is clearer now.
Best regards,
Stefan |
|
Tue Jul 19 02:35:04 2022, Jingyu Zhang, Increase event rate, use ROI mode, and install sw from source in Mac
|
Dear experts,
We are trying to increase the event rate of the DRS4. We looked into the ROI but couldn’t figure out how to run in ROI mode. We are wondering if there is pre-existing firmware for this? We also tried to download and build the software from source on MacOS 12.4 but we were not successful. Can you kindly help us with these?
Best regards,
Jingyu |
|
Fri Jul 29 14:09:35 2022, Stefan Ritt, Increase event rate, use ROI mode, and install sw from source in Mac
|
The firmware from the website always reads 1024 bins. You have to modify it to stop before that, like reading only 128 samples or so. For compiling under MacOSX, this should work, since I do it myself.
Regards,
Stefan
| Jingyu Zhang wrote: |
|
Dear experts,
We are trying to increase the event rate of the DRS4. We looked into the ROI but couldn’t figure out how to run in ROI mode. We are wondering if there is pre-existing firmware for this? We also tried to download and build the software from source on MacOS 12.4 but we were not successful. Can you kindly help us with these?
Best regards,
Jingyu
|
|
|
Tue Apr 12 10:40:36 2022, LynseyShun,
|
Hello, I am Lynsey. now I set A3-A0 to 1001 in ROI mode, but only OUT0 has output, and the other seven channels(OUT1-OUT7) do not output corresponding waveforms.
In ROI mode, can OUT0-OUT7 output sampled waveforms at the same time?
thank you very much |
|
Tue Apr 12 10:49:27 2022, Stefan Ritt,
|
A3-A0 = 1001 should be all you need to activate OUT0-OUT7. It works in our designs. Maybe double check the address lines with an oscilloscope.
Stefan
| LynseyShun wrote: |
|
Hello, I am Lynsey. now I set A3-A0 to 1001 in ROI mode, but only OUT0 has output, and the other seven channels(OUT1-OUT7) do not output corresponding waveforms.
In ROI mode, can OUT0-OUT7 output sampled waveforms at the same time?
thank you very much
|
|
|
Thu Jun 16 05:31:25 2022, LynseyShun,
|
Thank you very much for your help!
| Stefan Ritt wrote: |
|
A3-A0 = 1001 should be all you need to activate OUT0-OUT7. It works in our designs. Maybe double check the address lines with an oscilloscope.
Stefan
| LynseyShun wrote: |
|
Hello, I am Lynsey. now I set A3-A0 to 1001 in ROI mode, but only OUT0 has output, and the other seven channels(OUT1-OUT7) do not output corresponding waveforms.
In ROI mode, can OUT0-OUT7 output sampled waveforms at the same time?
thank you very much
|
|
|
|