| ID |
Date |
Author |
Subject |
|
542
|
Sun Oct 9 10:43:35 2016 |
Danny Petschke | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
(Board Type:9, DRS4)
Hello,
I´m trying to reach the timig resolution of about 2.5ps as written in the manual.
My settings are:
5GSamples/s
+/-0.5V
I followed the instructions of the manual. The chip was warm and ran about 10h. Then, Timing- followed by Voltage-Calibration.
The test-signal is a splittet sine-wave of 20MHz (function-generator) brought on A0 and A1 (A1 signal is delayed by 1ns-cable).
I´ve been testing different trigger-logic: (Chn1 AND Chn2), (Chn1 OR Chn2) and only Chn1 or Chn2.
Trigger-levels were changed too.
All setups show the same result of 1.009ns +/- 30-35ns (results from the DRS-Oscilloscope).
What is wrong from my side?
Thanks a lot for your help |
|
543
|
Sun Oct 9 11:39:18 2016 |
Stefan Ritt | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
Can you post a screenshot of your measurement?
Stefan
| Danny Petschke wrote: |
|
(Board Type:9, DRS4)
Hello,
I´m trying to reach the timig resolution of about 2.5ps as written in the manual.
My settings are:
5GSamples/s
+/-0.5V
I followed the instructions of the manual. The chip was warm and ran about 10h. Then, Timing- followed by Voltage-Calibration.
The test-signal is a splittet sine-wave of 20MHz (function-generator) brought on A0 and A1 (A1 signal is delayed by 1ns-cable).
I´ve been testing different trigger-logic: (Chn1 AND Chn2), (Chn1 OR Chn2) and only Chn1 or Chn2.
Trigger-levels were changed too.
All setups show the same result of 1.009ns +/- 30-35ns (results from the DRS-Oscilloscope).
What is wrong from my side?
Thanks a lot for your help
|
|
|
544
|
Mon Oct 10 11:30:37 2016 |
Danny Petschke | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
Hello Stefan,
Chn2 & Chn3 were used for delay-determination as you can see on the second picture.
The second picture shows all 4 Channels without any voltage input.
On Channel 4 streaks (red circle) occur often and Channel 1 has totally different Offset (Picture 1).
Thanks
| Stefan Ritt wrote: |
|
Can you post a screenshot of your measurement?
Stefan
| Danny Petschke wrote: |
|
(Board Type:9, DRS4)
Hello,
I´m trying to reach the timig resolution of about 2.5ps as written in the manual.
My settings are:
5GSamples/s
+/-0.5V
I followed the instructions of the manual. The chip was warm and ran about 10h. Then, Timing- followed by Voltage-Calibration.
The test-signal is a splittet sine-wave of 20MHz (function-generator) brought on A0 and A1 (A1 signal is delayed by 1ns-cable).
I´ve been testing different trigger-logic: (Chn1 AND Chn2), (Chn1 OR Chn2) and only Chn1 or Chn2.
Trigger-levels were changed too.
All setups show the same result of 1.009ns +/- 30-35ns (results from the DRS-Oscilloscope).
What is wrong from my side?
Thanks a lot for your help
|
|
|
| Attachment 1: allChannels_zero_scaled.png
|

|
| Attachment 2: Chn2_Chn3_1ns_delay_scaled.png
|

|
|
545
|
Mon Oct 10 12:03:27 2016 |
Stefan Ritt | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
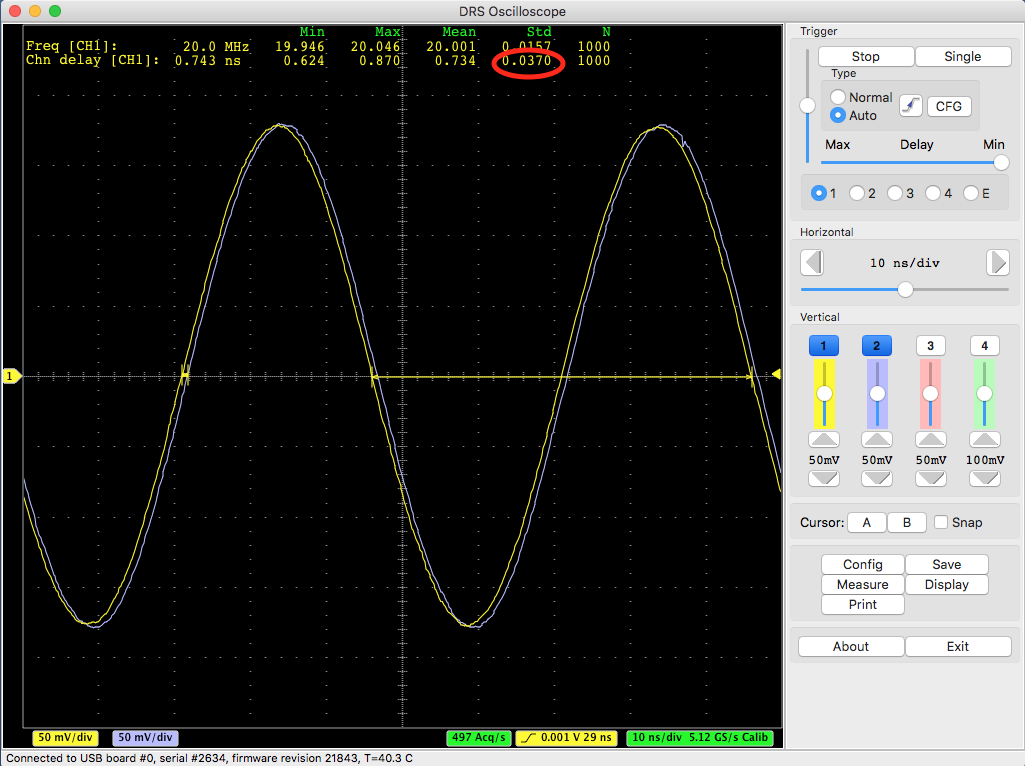
Ok, I got it. The timing resolution is affected by the signal-to-noise ratio over the rise-time of your signal. You find the full formula herer:
https://arxiv.org/abs/1405.4975
Your sine wave input signal has a slow rise time, and therefore limits the time resolution. I reproduced your measurement with a 20 MHz sine wave and got the same result:
If I increase the frequency to 100 MHz and increase the amplitude, I get a better resolution:
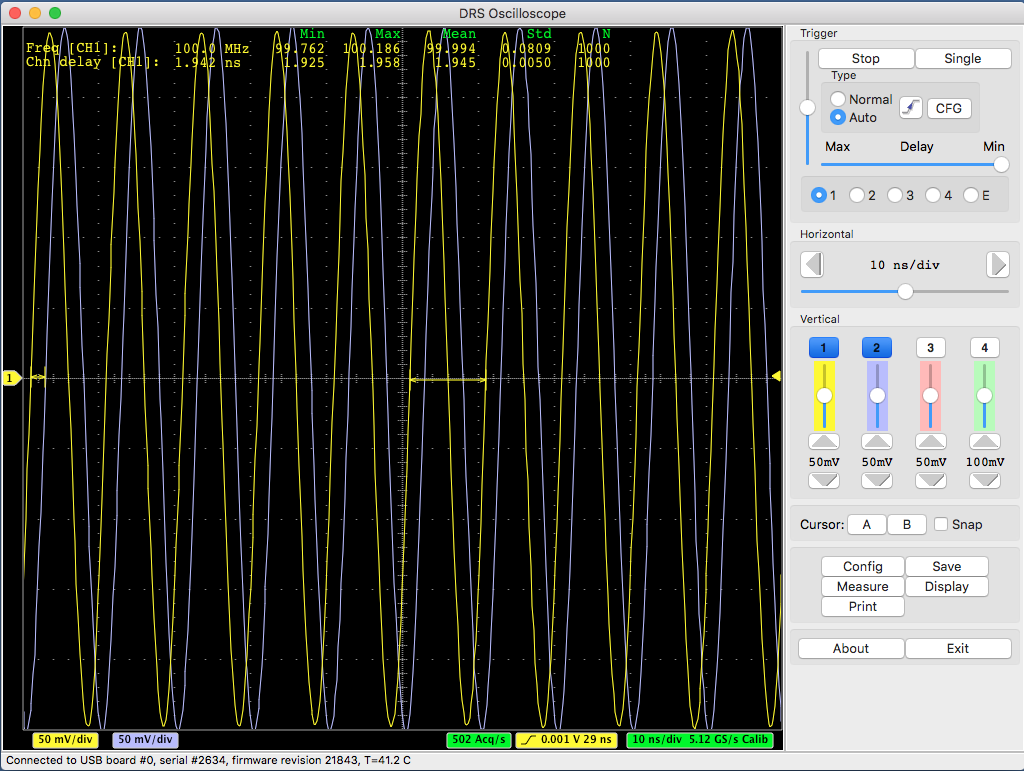
This is 5 ps which is better than 37 ps, but still not 2.5 ps. This can only be reached by sending single pulses to the evaluation board which have a rise time of > 300 mV / ns, which can be seen here:
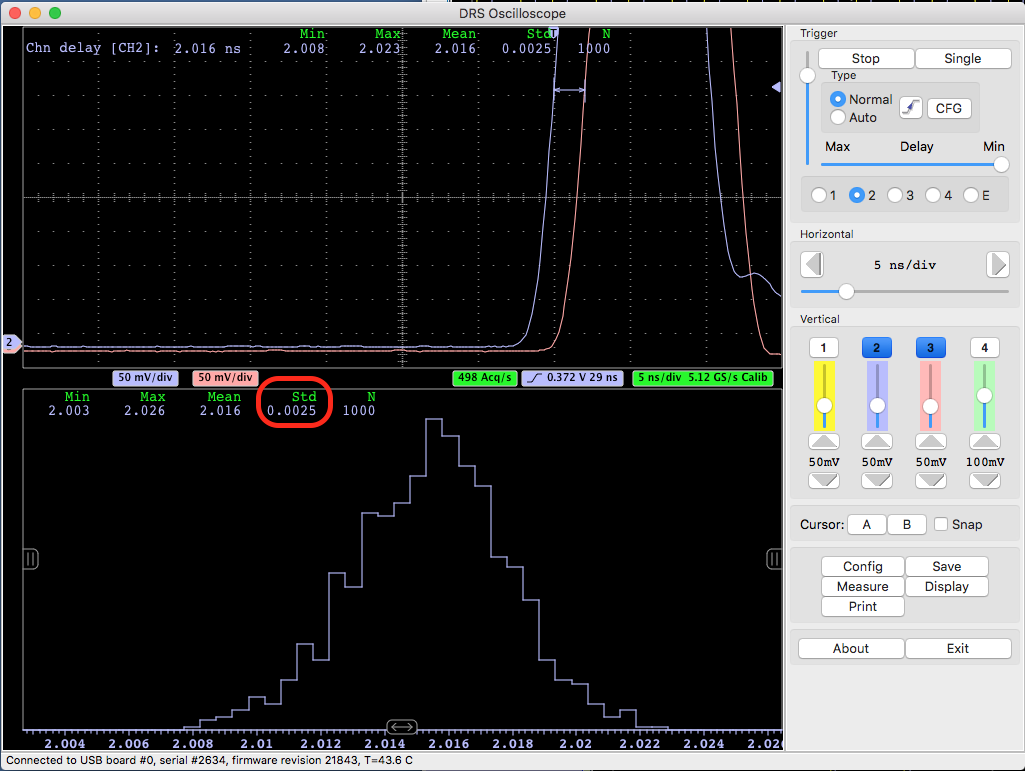
It is important to understand the relation timing - resolution vs. rise time / noise as explained in the quoted paper. If you have tiny pulses from your detector, you never will be able to measure excellent timing. This is physics, and not related to the specific electronics you are using.
Best regards,
Stefan
|
|
546
|
Tue Oct 11 09:04:33 2016 |
Danny Petschke | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
Hello Stefan,
thanks for the paper. That makes sense. I thought about sth. like that but wasn`t sure. Couldn´t check higher frequencies (limit of my function generator).
What do think about the other picture I attached yesterday where Chn1 shows a totally different offset than Chn2-4. Moreover Chn4 shows some streaks (red circle) ?
Best regards
Danny
| Stefan Ritt wrote: |
|
Ok, I got it. The timing resolution is affected by the signal-to-noise ratio over the rise-time of your signal. You find the full formula herer:
https://arxiv.org/abs/1405.4975
Your sine wave input signal has a slow rise time, and therefore limits the time resolution. I reproduced your measurement with a 20 MHz sine wave and got the same result:
If I increase the frequency to 100 MHz and increase the amplitude, I get a better resolution:
This is 5 ps which is better than 37 ps, but still not 2.5 ps. This can only be reached by sending single pulses to the evaluation board which have a rise time of > 300 mV / ns, which can be seen here:
It is important to understand the relation timing - resolution vs. rise time / noise as explained in the quoted paper. If you have tiny pulses from your detector, you never will be able to measure excellent timing. This is physics, and not related to the specific electronics you are using.
Best regards,
Stefan
|
|
|
547
|
Tue Oct 11 09:20:04 2016 |
Stefan Ritt | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
Concerning the offset, it looks to me like you moved the offset slider slider of channel 1 to a non-zero position. You see that from the marker at the very left side of the screen, where the yellow marker is at a different position as the others. Hint: a right-click on that slider sets it to zero. The little streak could be some kind of external noise.
| Danny Petschke wrote: |
|
Hello Stefan,
thanks for the paper. That makes sense. I thought about sth. like that but wasn`t sure. Couldn´t check higher frequencies (limit of my function generator).
What do think about the other picture I attached yesterday where Chn1 shows a totally different offset than Chn2-4. Moreover Chn4 shows some streaks (red circle) ?
Best regards
Danny
|
|
|
548
|
Tue Oct 11 22:11:26 2016 |
Stefan Ritt | time difference between 2 channels only ~30-35ps @ 5GSmples/s |
Thank you very much! I will check it tomorrow!
-d
Concerning the offset, it looks to me like you moved the offset slider slider of channel 1 to a non-zero position. You see that from the marker at the very left side of the screen, where the yellow marker is at a different position as the others. Hint: a right-click on that slider sets it to zero. The little streak could be some kind of external noise.
| Danny Petschke wrote: |
|
Hello Stefan,
thanks for the paper. That makes sense. I thought about sth. like that but wasn`t sure. Couldn´t check higher frequencies (limit of my function generator).
What do think about the other picture I attached yesterday where Chn1 shows a totally different offset than Chn2-4. Moreover Chn4 shows some streaks (red circle) ?
Best regards
Danny
|
|
|
259
|
Fri Jun 7 11:44:17 2013 |
tmiron alon | thank you |
| Stefan Ritt wrote: |
|
| tmiron alon wrote: |
|
Hallo,
I'm using DRS4 Evaluation Board Rev 4.0 and I'm trying to change the output of the samples to be an average of # measurements (1000 or even more)
during the process I have encountered some difficulties I hope you will be able to help me with:
1. the DRS chip have 8 channels but the Evaluation board have only 4 channels. does the default mode of the DRS in the Evaluation Board is 1024 bins for each channel or 2048?
2. in the readout mode, does it samples all the 1024 bins waveform from a channel and then move to the next one, or after each bin it move to the next channel?
3. In the file "drs4_eval4_app.vhd", I have a problem finding the names of the signals that represents the registers bits which tell me what is the number of the bin (1-1024) the ADC is reading from the DRS, and the signals
that represents registers A0-A3. can you send me their names?
4. In another matter- is the -0.5V to 0.5V is the upper and lower limit of the input (or just a working range), and if not what is the limit for AC? is there a fuse on the board in case of overload from the input? (I didn't see it in the User's Manual, but I didn't know if you will mention it there in case there is one).
thanks in advance and have a nice day,
Tmiron
|
1. All 8 channels are read out, but only 4 are displayed in the oscilloscope.
2. It reads all 1024 bins from a channel, then switch to the next channel.
3. The ADC readout happens in lines 1576+. The register for the sample count is drs_sample_count, and the signal for the address is drs_addr.
4. The evaluation board manual explicitly mentions the maximum allowed input range on page 5.
/Stefan
|
Thank you for the answer.
Have a nice week,
Tmiron. |
|
367
|
Fri Sep 12 11:52:21 2014 |
Dmitry Hits | synchronizing two DRS4 evaluation boards readout with one computer |
Hi everyone,
Has anyone tried to synchronize 2 (two) DRS4 evaluation boards readout by the same computer? I have read about some attempts on this board in the past, but I do not know if they have succeeded. If yes, could you share your experience and/or software.
Thank you very much,
Dmitry.
|
|
368
|
Fri Sep 12 13:00:04 2014 |
Stefan Ritt | synchronizing two DRS4 evaluation boards readout with one computer |
| Dmitry Hits wrote: |
|
Hi everyone,
Has anyone tried to synchronize 2 (two) DRS4 evaluation boards readout by the same computer? I have read about some attempts on this board in the past, but I do not know if they have succeeded. If yes, could you share your experience and/or software.
Thank you very much,
Dmitry.
|
Please read the manual http://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf page 25 where this is described in detail.
/Stefan |
|
369
|
Fri Sep 12 13:37:42 2014 |
Dmitry Hits | synchronizing two DRS4 evaluation boards readout with one computer |
| Stefan Ritt wrote: |
|
| Dmitry Hits wrote: |
|
Hi everyone,
Has anyone tried to synchronize 2 (two) DRS4 evaluation boards readout by the same computer? I have read about some attempts on this board in the past, but I do not know if they have succeeded. If yes, could you share your experience and/or software.
Thank you very much,
Dmitry.
|
Please read the manual http://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf page 25 where this is described in detail.
/Stefan
|
Hi Stefan,
Thank you for pointing me to the document. Does it apply only to version 5 of the board or can it be applied also to version 4 (which is the one I have)?
Dmitry |
|
370
|
Fri Sep 12 13:41:43 2014 |
Stefan Ritt | synchronizing two DRS4 evaluation boards readout with one computer |
| Dmitry Hits wrote: |
|
| Stefan Ritt wrote: |
|
| Dmitry Hits wrote: |
|
Hi everyone,
Has anyone tried to synchronize 2 (two) DRS4 evaluation boards readout by the same computer? I have read about some attempts on this board in the past, but I do not know if they have succeeded. If yes, could you share your experience and/or software.
Thank you very much,
Dmitry.
|
Please read the manual http://www.psi.ch/drs/DocumentationEN/manual_rev50.pdf page 25 where this is described in detail.
/Stefan
|
Hi Stefan,
Thank you for pointing me to the document. Does it apply only to version 5 of the board or can it be applied also to version 4 (which is the one I have)?
Dmitry
|
In principle it should also work with version 4, but I'm not sure how well the V4 software supports this. You might try the V5 software with your V4 boards.
/Stefan |
|
305
|
Mon Nov 18 15:49:01 2013 |
Dmitry Hits | synchronisation of readouts of two boards for offline analysis |
Dear Stefan,
I am trying to synchronise the readout of two test boards, one is the DRS4 test board, the other is PSI46 test board (used for the readout of CMS pixel chip) for the offline analysis. I think that the most secure way to accomplish this is to pass a trigger number from one test board to the other.
The PSI46 test board has a software which allows it to accept a 16 bit number following the trigger pulse. I was wondering whether it would be possible for DRS4 board to generate such a trigger number on the trigger out line after sending the trigger. Also would it be possible to record this trigger number for every event stored by DRS4 board?
If none of this possible or requires a lot of time, then as a minimum, would it be possible to send-through only the triggers that were recorded by the DRS4 board?
Please let me know if you have better idea how to do this.
Thank you very much,
Dmitry. |
|
306
|
Mon Nov 18 16:00:26 2013 |
Stefan Ritt | synchronisation of readouts of two boards for offline analysis |
| Dmitry Hits wrote: |
|
Dear Stefan,
I am trying to synchronise the readout of two test boards, one is the DRS4 test board, the other is PSI46 test board (used for the readout of CMS pixel chip) for the offline analysis. I think that the most secure way to accomplish this is to pass a trigger number from one test board to the other.
The PSI46 test board has a software which allows it to accept a 16 bit number following the trigger pulse. I was wondering whether it would be possible for DRS4 board to generate such a trigger number on the trigger out line after sending the trigger. Also would it be possible to record this trigger number for every event stored by DRS4 board?
If none of this possible or requires a lot of time, then as a minimum, would it be possible to send-through only the triggers that were recorded by the DRS4 board?
Please let me know if you have better idea how to do this.
Thank you very much,
Dmitry.
|
There are indeed several methods. You can output the trigger number at the DRS evaluation board via the trigger output, but you would have to implement this yourself in the firmware.
The send-though of recorded triggers is already implemented in the board, so you could use that. The only thing to make sure is to to readout and re-enable the PSI46 board before you readout the DRS4 board. If you would first read the DRS4 board, and re-enable the DRS4 board via StartDomino(), then there could be the next trigger going through to the PSI46 board without that board being ready. So the sequence is
- connect trigger out of DRS4 to PSI46
- arm PSI46 board
- arm DRS4 board
- wait for trigger by calling IsBusy()
- read out PSI46 board
- read out DRS4 board
- call StartDomino(), which re-enables also the trigger though
Best regards,
Stefan |
|
319
|
Mon Dec 16 11:09:25 2013 |
Dmitry Hits | synchronisation of readouts of two boards for offline analysis |
| Stefan Ritt wrote: |
|
| Dmitry Hits wrote: |
|
Dear Stefan,
I am trying to synchronise the readout of two test boards, one is the DRS4 test board, the other is PSI46 test board (used for the readout of CMS pixel chip) for the offline analysis. I think that the most secure way to accomplish this is to pass a trigger number from one test board to the other.
The PSI46 test board has a software which allows it to accept a 16 bit number following the trigger pulse. I was wondering whether it would be possible for DRS4 board to generate such a trigger number on the trigger out line after sending the trigger. Also would it be possible to record this trigger number for every event stored by DRS4 board?
If none of this possible or requires a lot of time, then as a minimum, would it be possible to send-through only the triggers that were recorded by the DRS4 board?
Please let me know if you have better idea how to do this.
Thank you very much,
Dmitry.
|
There are indeed several methods. You can output the trigger number at the DRS evaluation board via the trigger output, but you would have to implement this yourself in the firmware.
The send-though of recorded triggers is already implemented in the board, so you could use that. The only thing to make sure is to to readout and re-enable the PSI46 board before you readout the DRS4 board. If you would first read the DRS4 board, and re-enable the DRS4 board via StartDomino(), then there could be the next trigger going through to the PSI46 board without that board being ready. So the sequence is
- connect trigger out of DRS4 to PSI46
- arm PSI46 board
- arm DRS4 board
- wait for trigger by calling IsBusy()
- read out PSI46 board
- read out DRS4 board
- call StartDomino(), which re-enables also the trigger though
Best regards,
Stefan
|
Dear Stefan
Thank you very much for the answer. I did not have a chance to implement this yet.
I have a follow up question:
Is the following sequence already implemented in the DRS oscilloscope program? Could you point me to an example of such a sequence?
- arm DRS4 board
- wait for trigger by calling IsBusy()
- read out DRS4 board
- call StartDomino(), which re-enables also the trigger through
Cheers
Dmitry
|
|
320
|
Tue Dec 17 08:45:32 2013 |
Stefan Ritt | synchronisation of readouts of two boards for offline analysis |
| Dmitry Hits wrote: |
|
| Stefan Ritt wrote: |
|
| Dmitry Hits wrote: |
|
Dear Stefan,
I am trying to synchronise the readout of two test boards, one is the DRS4 test board, the other is PSI46 test board (used for the readout of CMS pixel chip) for the offline analysis. I think that the most secure way to accomplish this is to pass a trigger number from one test board to the other.
The PSI46 test board has a software which allows it to accept a 16 bit number following the trigger pulse. I was wondering whether it would be possible for DRS4 board to generate such a trigger number on the trigger out line after sending the trigger. Also would it be possible to record this trigger number for every event stored by DRS4 board?
If none of this possible or requires a lot of time, then as a minimum, would it be possible to send-through only the triggers that were recorded by the DRS4 board?
Please let me know if you have better idea how to do this.
Thank you very much,
Dmitry.
|
There are indeed several methods. You can output the trigger number at the DRS evaluation board via the trigger output, but you would have to implement this yourself in the firmware.
The send-though of recorded triggers is already implemented in the board, so you could use that. The only thing to make sure is to to readout and re-enable the PSI46 board before you readout the DRS4 board. If you would first read the DRS4 board, and re-enable the DRS4 board via StartDomino(), then there could be the next trigger going through to the PSI46 board without that board being ready. So the sequence is
- connect trigger out of DRS4 to PSI46
- arm PSI46 board
- arm DRS4 board
- wait for trigger by calling IsBusy()
- read out PSI46 board
- read out DRS4 board
- call StartDomino(), which re-enables also the trigger though
Best regards,
Stefan
|
Dear Stefan
Thank you very much for the answer. I did not have a chance to implement this yet.
I have a follow up question:
Is the following sequence already implemented in the DRS oscilloscope program? Could you point me to an example of such a sequence?
- arm DRS4 board
- wait for trigger by calling IsBusy()
- read out DRS4 board
- call StartDomino(), which re-enables also the trigger through
Cheers
Dmitry
|
Have a look at the drs_exam.cpp program which comes with the software, it implements exactly this sequence.
/Stefan |
|
668
|
Wed Mar 14 00:38:15 2018 |
Will Flanagan | sub-ms precision timestamps? |
Dear DRS4 community,
Is there a way to extract timestamps with sub-ms precision? The milliseconds of an event is clearly given when unpacking the header. I would like to determine how far apart events are when they are within the same millisecond.
Thanks,
Will |
|
672
|
Thu Mar 15 08:44:26 2018 |
Stefan Ritt | sub-ms precision timestamps? |
Putting sub-ms precision into the header does not make sense, since the USB transfer only happens in time-slots of about 2 ms. To get better timing, you would need a hardware time clock in the FPGA, which does not exist right now.
Best,
Stefan
| Will Flanagan wrote: |
|
Dear DRS4 community,
Is there a way to extract timestamps with sub-ms precision? The milliseconds of an event is clearly given when unpacking the header. I would like to determine how far apart events are when they are within the same millisecond.
Thanks,
Will
|
|
|
346
|
Fri May 16 14:04:47 2014 |
Benjamin LeGeyt | simultaneous writing and reading with region of interest mode? |
Hello!
We're developing electronics based on the DRS4 to read out a breast PET scanner and our event rate will be quite high so we're concerned about dead-time. with that in mind, I have a question regarding the mode of simultaneous writing and reading that is described in the DRS4 data sheet. I think the description there is quite clear but I'd like to ask for a few clarifications.
1) Are the channels required to be read out via the channel multiplexer when doing the simultaneous write/read or is it ok to read out all channels in parallel (even the ones still sampling) and just throw away the ones you don't want?
2) If one wanted to use region of interest mode along with the simultaneous write/read, how would that work? Here is what I would think - please tell me if I'm missing some important detail:
-upon trigger, deassert dwrite.
-strobe RSRLOAD
-increment write config register
-reassert dwrite
-start the readout (reading out stop shift register value on SROUT as data comes out)
3) now to add even more complexity - I would actually like to use simultaneous write/read along with region of interest mode and also with pairs of cascaded channels as we need >500ns latency and 2Gsps is too slow for our signals. the combination of cascading and simultaneous write/read is addressed in the data sheet but I still have one question. In normal circumstances when cascading channels, one would read out the value in the write shift register to know which channel was active when the domino wave stopped. I assume that this is not possible when dwrite is enabled as the write shift register is then advanced by the domino wave, so I see three possibilities:
-accept more dead-time and read out the write-shift-register each time (adds ~240ns to deadtime)
-just read out both channels every time and figure out later where is the data you want
-attempt to keep track of the expected state of write-shift-register in firmware.
is there a better option that I have not thought of?
many thanks!
Benjamin LeGeyt |
|
347
|
Mon May 19 08:04:57 2014 |
Stefan Ritt | simultaneous writing and reading with region of interest mode? |
| Benjamin LeGeyt wrote: |
|
Hello!
We're developing electronics based on the DRS4 to read out a breast PET scanner and our event rate will be quite high so we're concerned about dead-time. with that in mind, I have a question regarding the mode of simultaneous writing and reading that is described in the DRS4 data sheet. I think the description there is quite clear but I'd like to ask for a few clarifications.
1) Are the channels required to be read out via the channel multiplexer when doing the simultaneous write/read or is it ok to read out all channels in parallel (even the ones still sampling) and just throw away the ones you don't want?
2) If one wanted to use region of interest mode along with the simultaneous write/read, how would that work? Here is what I would think - please tell me if I'm missing some important detail:
-upon trigger, deassert dwrite.
-strobe RSRLOAD
-increment write config register
-reassert dwrite
-start the readout (reading out stop shift register value on SROUT as data comes out)
3) now to add even more complexity - I would actually like to use simultaneous write/read along with region of interest mode and also with pairs of cascaded channels as we need >500ns latency and 2Gsps is too slow for our signals. the combination of cascading and simultaneous write/read is addressed in the data sheet but I still have one question. In normal circumstances when cascading channels, one would read out the value in the write shift register to know which channel was active when the domino wave stopped. I assume that this is not possible when dwrite is enabled as the write shift register is then advanced by the domino wave, so I see three possibilities:
-accept more dead-time and read out the write-shift-register each time (adds ~240ns to deadtime)
-just read out both channels every time and figure out later where is the data you want
-attempt to keep track of the expected state of write-shift-register in firmware.
is there a better option that I have not thought of?
many thanks!
Benjamin LeGeyt
|
Unfortunately the simultaneous writing/reading does not work as described in the data sheet. Just recently we found out that due to a bug in the chip a part of the waveform is missing if you read and write at the same time. The only clean solution is to use two DRS4 chips in parallel. You read one chip while the other samples, then you switch over between them. In that case all the ROI scheme and channel cascading works normally. The dead time will be addressed by the DRS5 chip, which will be dead time free, but will not be available until in maybe 2-3 years.
/Stefan |