ID |
Date |
Author |
Subject |
|
116
|
Fri Feb 25 10:13:51 2011 |
Stefan Ritt | Announcement digital pulse processing workshop | Dear colleague,
if you live not so far from Zurich, you might be interested in this workshop:
http://www.xtronix.ch/hep/psi_workshop.htm
This is a combined PSI-CAEN presentation of digitizer hardware including the new V1742 board based on the DRS4 chip. The workshop will also show how digital pulse processing can be used to effectively extract time and energy from detector signals, and thus replace more and more traditional analog electronics. Please register at the above site if you are interested.
Best regards,
Stefan Ritt |
|
115
|
Mon Feb 21 12:42:33 2011 |
S S Upadhya | how to synchronize Sampling frequency of two evaluation boards |
| Stefan Ritt wrote: |
|
| Stefan Ritt wrote: |
|
| S S Upadhya wrote: |
|
Dear sir,
We have two evaluation boards of DRS4. We would like to use 8 inputs to be recorded on a trigger and we would like to find the relative time difference of inputs. So is it possible to synchronize the sampling frequency of the two evaluation boards.
with best regards
S S Upadhya
|
No, not in this version. We plan a future version of the evaluation board with clock synchronization, but that board will not be ready before 2-3 months. Anyhow the board is more meant as an evaluation board, to test the chip and develop own electronics, and not to build a complete DAQ system. Note that CAEN distributes now a VME board containing the four DRS4 chips and 32 channels on a board.
|
Well, one thing you can do is to generate an external trigger and send it to the external trigger input of both cards. Then you can determine the time in respect to the trigger point in both boards. But since the trigger cell jitters by 2-3 cells in each chip, the accuracy is limited to about 1-2 ns when running at 2 GS/s.
|
Dear Stefan,
Thanks for the second suggestion. I wanted to do feasibility study of DRS4 application to our requirement in the experiment
Thank you again sir,
Upadhya |
|
114
|
Mon Feb 21 08:10:31 2011 |
Stefan Ritt | how to synchronize Sampling frequency of two evaluation boards |
| Stefan Ritt wrote: |
|
| S S Upadhya wrote: |
|
Dear sir,
We have two evaluation boards of DRS4. We would like to use 8 inputs to be recorded on a trigger and we would like to find the relative time difference of inputs. So is it possible to synchronize the sampling frequency of the two evaluation boards.
with best regards
S S Upadhya
|
No, not in this version. We plan a future version of the evaluation board with clock synchronization, but that board will not be ready before 2-3 months. Anyhow the board is more meant as an evaluation board, to test the chip and develop own electronics, and not to build a complete DAQ system. Note that CAEN distributes now a VME board containing the four DRS4 chips and 32 channels on a board.
|
Well, one thing you can do is to generate an external trigger and send it to the external trigger input of both cards. Then you can determine the time in respect to the trigger point in both boards. But since the trigger cell jitters by 2-3 cells in each chip, the accuracy is limited to about 1-2 ns when running at 2 GS/s. |
|
113
|
Sat Feb 19 22:46:35 2011 |
Stefan Ritt | how to synchronize Sampling frequency of two evaluation boards |
| S S Upadhya wrote: |
|
Dear sir,
We have two evaluation boards of DRS4. We would like to use 8 inputs to be recorded on a trigger and we would like to find the relative time difference of inputs. So is it possible to synchronize the sampling frequency of the two evaluation boards.
with best regards
S S Upadhya
|
No, not in this version. We plan a future version of the evaluation board with clock synchronization, but that board will not be ready before 2-3 months. Anyhow the board is more meant as an evaluation board, to test the chip and develop own electronics, and not to build a complete DAQ system. Note that CAEN distributes now a VME board containing the four DRS4 chips and 32 channels on a board. |
|
112
|
Sat Feb 19 17:25:29 2011 |
S S Upadhya | how to synchronize Sampling frequency of two evaluation boards | Dear sir,
We have two evaluation boards of DRS4. We would like to use 8 inputs to be recorded on a trigger and we would like to find the relative time difference of inputs. So is it possible to synchronize the sampling frequency of the two evaluation boards.
with best regards
S S Upadhya |
|
111
|
Tue Nov 16 16:38:06 2010 |
Stefan Ritt | Reference design for DRS4 active input buffer |
| Jinhong Wang wrote: |
|
Hi, stefan,
In the DC coupled version of the analog drivers for DRS4 input in Eval. Board V3, you mentioned that CMOFS of THS4508 was set to 1.8V to match the input range of DRS4, however, will this clash with the requirements of DRS4 input voltage between 0.1 V ~1.5V ? The output of THS4508 can easily rise beyond 1.5V for CMOFS=1.8V. I also noticed the resister paris R13/R15, R14/R16 was added among the output of THS4508 and the inputs of DRS4, were these resister pairs were used to attenuate the level of THS4508 output signal (a half ? ) to match the input requirements of DRS4? Maybe I have some misunderstanding about it.
|
No you are right about that. The THS4508 has a gain of +2, and by using the resistor pairs we do
1) Reduce the gain back to unity
2) Reduce the input DC level from 1.8V to 0.9V to match the input range
3) Terminate the signals at the input of the DRS chip to minimize reflections
I know this is not so obvious from the schematic, so thanks for asking.
- Stefan |
|
110
|
Tue Oct 12 03:53:37 2010 |
Jinhong Wang | Reference design for DRS4 active input buffer |
| Stefan Ritt wrote: |
|
The design of high frequency differential input stages with the DRS4 is a challenge, since the chip draws quite some current at the input (up to 1 mA at 5 GSPS), which must be sourced by the input buffer. A simple transformer as used in the DRS4 Evaluation Board 2.0 limits the bandwidth to 220 MHz. In meantime two active input stages have been worked out and successfully been tested, both utilizing the THS4508 differential amplifier. The first design is AC-coupled and uses less power, the second design is DC-coupled and uses more power with the benefit of delivering a higher bandwidth.
Both designs use a clamping diode at the input as a protection against high voltage spikes at the input. We used a RCLAMP0502B diode from SEMTECH, but any fast voltage suppressor diode will do the job.
The CMOFS input to the THS4508 set the common mode of the differential amplifier. In the AC version the level is set to mid-rail (2.5V), in the DC version it's set to 1.8V to match the input range of the DRS4.
The CAL+ and CAL- signals are used to bias the inputs to a well-defined DC level and can also be used to calibrate the chip. For bipolar inputs, they are both set to 0.8V. A positive 0.5V input pulse then drives DRS_IN+ to (0.8+0.25)V = 1.05V and DRS_IN- to (0.8-0.25)V = 0.55V. A negative 0.5V pulse then drives then DRS_IN+ to 0.55V and DRS_IN- to 1.05V. With ROFS=1.6V, the full dynamic range of the DRS4 is then used. Note that the THS4508 has a gain of 2, and the input has a -6dB voltage divider to compensate for that. To use other input ranges, such as -1V...0V, the CAL+ and CAL- signals can be adjusted accordingly. Note that the inputs of the DRS4 must always be between 0.1V and 1.5V.
AC-coupled version
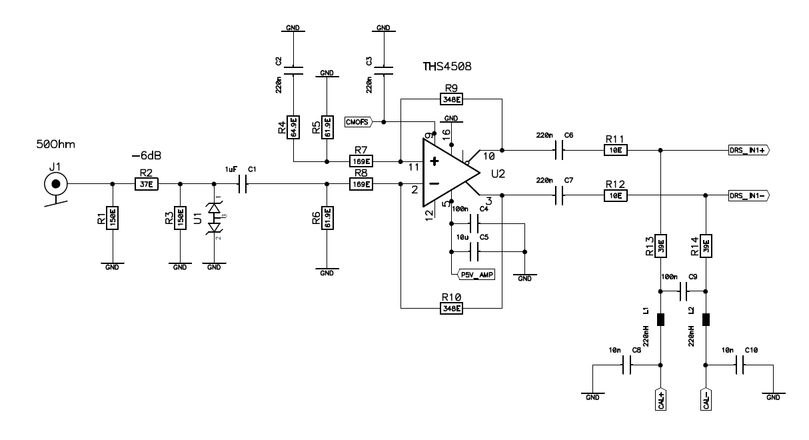
(click to enlarge)
Power supply: +5 V 40 mA
Bandwidth (-3dB): 600 MHz
CMOFS: 2.5 V
Transfer function:
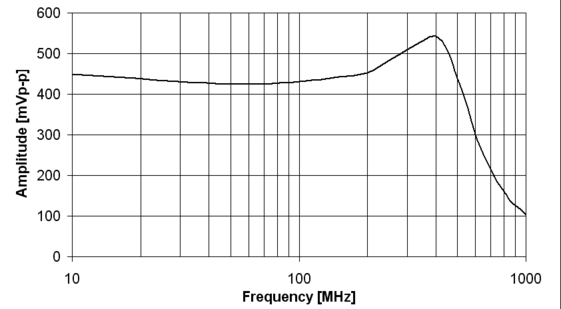
(click to enlarge)
The transfer function was measured by applying a fixed amplitude sine wave to the input, and measuring the peak-to-peak value of the read out waveform with the DRSOsc application.
DC-coupled Version
The DC-coupled version has a slightly higher power consumption since there is a constant current flowing through the output into the DRS4 chip. On the other hand, the bandwidth is a bit higher and the peaking around 400 MHz is a bit smaller. The input is still AC-coupled, so both positive and negative pulses can be accepted.
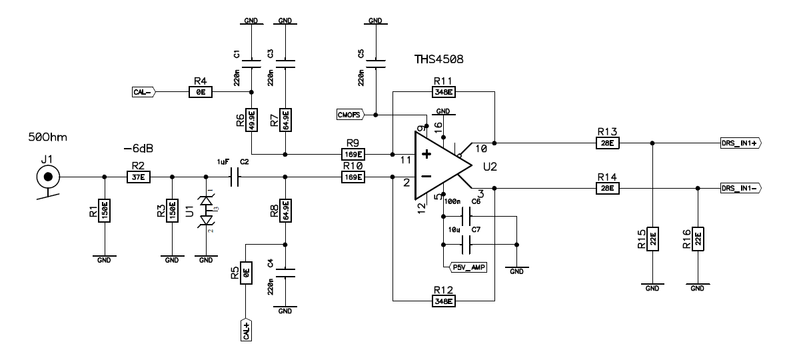
(click to enlarge)
Power supply: +5 V 115 mA
Bandwidth (-3dB): 800 MHz
CMOFS: 1.8 V
Transfer function:
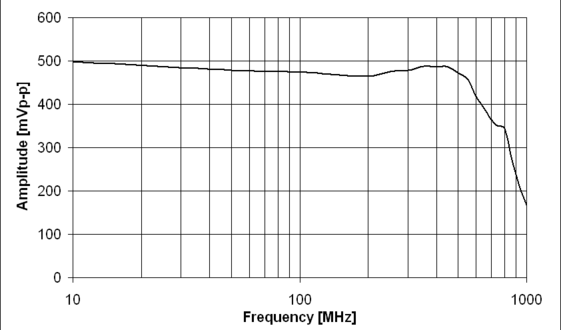
(click to enlarge)
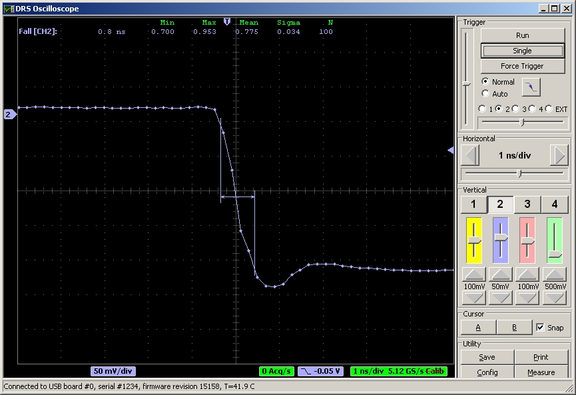
Achievable performance
With the active input stage, much faster rise- and fall times can be achieved. Following picture shows a signal from a external clock having a fall time of about 300 ps being recorded with the AC-coupled version of the active input stage. The fall time of the recorded signal is about 800 ps, which is about the minimum which can be achieved with the AC-coupled version. The DC-coupled version achieves about 700ps.
|
Hi, stefan,
In the DC coupled version of the analog drivers for DRS4 input in Eval. Board V3, you mentioned that CMOFS of THS4508 was set to 1.8V to match the input range of DRS4, however, will this clash with the requirements of DRS4 input voltage between 0.1 V ~1.5V ? The output of THS4508 can easily rise beyond 1.5V for CMOFS=1.8V. I also noticed the resister paris R13/R15, R14/R16 was added among the output of THS4508 and the inputs of DRS4, were these resister pairs were used to attenuate the level of THS4508 output signal (a half ? ) to match the input requirements of DRS4? Maybe I have some misunderstanding about it.
|
|
107
|
Wed Jul 21 10:58:20 2010 |
Stefan Ritt | ENOB of DRS |
| Jinhong Wang wrote: |
|
Hi, Stefan, I see in your ppt "Design and performance of 6 GSPS waveform digitizing chip DRS4" , you define DRS4 ENOB as 1Vpp/0.35mv(RMS) = 11.5bit, where, 1Vpp is the linearity input range, and 0.35mv is the rms voltage after offset correction. What I understand is that 0.35mV is obtained from DC offset Correction, hence 11.5 bit is for DC input, am i right? If true, what about ENOB for AC input in the whole analog bandwidth? thanks~
|
The expression ENOB for 1Vpp/0.35mV(RMS) is wrong, but I learned this later. Now I call it SNR. The ENOB is calculated in a more complicated way, see for example http://en.wikipedia.org/wiki/ENOB. If you measure the ENOB without timing correction, it's pretty poor (in the order of 7-8 bits). This is because without timing calibration, a sine input has huge side bands, and the ENOB involves the power of your signal over the power of the side bands. If you do a proper timing calibration, you spectrum gets "sharper", and hence the ENOB increases. But I have to admit that I never measured it carefully, since we are still optimizing the timing calibration. Once we have a perfect timing calibration, I will do it and update the data sheet. |
|
106
|
Wed Jul 21 10:46:32 2010 |
Jinhong Wang | ENOB of DRS | Hi, Stefan, I see in your ppt "Design and performance of 6 GSPS waveform digitizing chip DRS4" , you define DRS4 ENOB as 1Vpp/0.35mv(RMS) = 11.5bit, where, 1Vpp is the linearity input range, and 0.35mv is the rms voltage after offset correction. What I understand is that 0.35mV is obtained from DC offset Correction, hence 11.5 bit is for DC input, am i right? If true, what about ENOB for AC input in the whole analog bandwidth? thanks~ |
|
105
|
Mon Jul 19 12:47:17 2010 |
Stefan Ritt | Fixed Patter Timing Jitter |
| Jinhong Wang wrote: |
|
Hi Stefan, can you give some suggestions on determination of fixed pattern timing jitter of DRS4? Thanks~
|
I will prepare some more detailed description of how to do this in the near future, but we are still learning ourselves constantly how to do that better.
So for the moment I only can recommend you to read the function DRSBoard::CalibrateTiming() and AnalyzeWF(). What you basically do is to define an array of "effective" bin widths t[i]. You start with the nominal bin width (let's say 500ps at 2 GSPS). Now you measure a periodic signal, and look for the zero crossings. If you have a 100 MHz clock, the time between two positive transitions (low-to-high) is 10.000ns. Now you measure the width as seen by the DRS chip, assuming the effective bin widths. The exact zero crossing you interpolate between two samples to improve the accuracy. Now you measure something different, let's say 10.1ns. So you know the ~20 bins between the zero crossings are "too wide", but you don't know which one of them is too wide. So you distribute the "too wide" equally between all bins, that is you decrease the effective width of these bins from 500ps to 500-0.1ns/20=499.995 ps. Then you do this iteratively, that is for all cycles in the waveform, and for many (1000's) of recorded waveforms. It is important that the phase of you measured clock is random, so that all bins are covered equally. Then you realize that the solution oscillates, which you can reduce by using a damping factor (called "damping" in my C code). So you do not correct to 499.995ps, but maybe to 499.999ps. If you iterate often enough, the solution kind of stabilizes.
The attached picture shows the result of such a calibration. Green is the effective bin width which in the end only slightly deviates from 500ps. But the "integral temporal nonlinearity" shows a typical shape for the DRS chip. It's defined as
n
Ti[n] = Sum (t[i]-500ps)
i=0
where t[i] is the effective bin width. So Ti[0] is zero by definition, but the deviation around bin 450 can go up to 1ns at 2 GSPS.
Now you can test you calibration, by measuring again the period of your clock. If you do everything correctly and have a low jitter external clock and no noise on your DRS4 power supply voltages, you should see a residual jitter of about 40ps.
Hope this explanation helps a bit. Let me know if I was not clear enough at some points.
- Stefan |
|
104
|
Mon Jul 19 12:07:04 2010 |
Jinhong Wang | Fixed Patter Timing Jitter | Hi Stefan, can you give some suggestions on determination of fixed pattern timing jitter of DRS4? Thanks~ |
|
99
|
Mon Jul 12 16:07:37 2010 |
Stefan Ritt | Announcement evaluation board V3 | Dear DRS4 users,
a new version of the evaluation board has been designed and is in production now. The main difference is that it uses active input amplifiers, which result in an analog bandwidth of 700 MHz (as compared with the 220 MHz of the previous board) at moderate power consumption, so the board can still be powered by the USB port. New orders will receive boards V3, the old V2 boards are not available any more.
It is mandatory to use the software revision 3.0.0 or later with the new board. This software has also many new features in the oscilloscope application, and together with the new firmware it reduces the noise of the board below 0.5 mV RMS. Although the software can be used with old V2 boards, some limitations might apply due to the old firmware of the boards. People having a Xilinx download cable can flash the firmware contained in the 3.0.0 revision to their V2 board to get all features of the new software.
The evaluation board manual V3 contains the new schematics of the analog inputs using the THS4508 differential amplifier, so people doing their own design can use this schematics as and example.
Best regards,
Stefan Ritt |
|
98
|
Tue Jun 22 11:37:42 2010 |
Jinhong Wang | Reset of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset?
|
Yes, they are stay low until Reset goes high. the process is as following
Step1: Reset ='1', DEnable ='0', DWrite ='0', Reg_addr ="1111", Rsload='0', Srin ='0'
Step2: Reset='0', the others do not change, the low of the pulse is longer than 10 ns.
Step3: Reset='1', the others do not change, wait for some time
Step4: DEnable ='1' to start the domino.
|
Ok, then I have no idea. I never tried several reset pulses (actually this is not needed), so I have to reproduce the problem myself and investigate it. Actually in all my designs the reset input is just left open, since the internal initial reset is enough, so I have to modify my design first...
|
Ok ,thank you. |
|
97
|
Tue Jun 22 11:35:18 2010 |
Stefan Ritt | Reset of DRS4 |
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset?
|
Yes, they are stay low until Reset goes high. the process is as following
Step1: Reset ='1', DEnable ='0', DWrite ='0', Reg_addr ="1111", Rsload='0', Srin ='0'
Step2: Reset='0', the others do not change, the low of the pulse is longer than 10 ns.
Step3: Reset='1', the others do not change, wait for some time
Step4: DEnable ='1' to start the domino.
|
Ok, then I have no idea. I never tried several reset pulses (actually this is not needed), so I have to reproduce the problem myself and investigate it. Actually in all my designs the reset input is just left open, since the internal initial reset is enough, so I have to modify my design first... |
|
96
|
Tue Jun 22 11:29:26 2010 |
Jinhong Wang | Reset of DRS4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset?
|
Yes, they are stay low until Reset goes high. the process is as following
Step1: Reset ='1', DEnable ='0', DWrite ='0', Reg_addr ="1111", Rsload='0', Srin ='0'
Step2: Reset='0', the others do not change, the low of the pulse is longer than 10 ns.
Step3: Reset='1', the others do not change, wait for some time
Step4: DEnable ='1' to start the domino. |
|
95
|
Tue Jun 22 11:02:30 2010 |
Stefan Ritt | Reset of DRS4 |
| Jinhong Wang wrote: |
|
Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong
|
Have you made sure that DENABLE and DWRITE stays low during the reset? |
|
94
|
Tue Jun 22 10:50:19 2010 |
Jinhong Wang | Reset of DRS4 | Hi Stefan,
I found DRS draw a lot of current when applied Reset after power on, and the PLL does not work properly. I believe there was something that I misunderstood. So, what will happen when Reset is applied more than once after power on? . Though the chip worked well without a Reset, i want to try to find out what was wrong, for a better understanding of DRS.
best regards!
Jinhong |
|
93
|
Sat Jun 19 10:09:18 2010 |
Jinhong Wang | DVDD Problem of DRS 4 |
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan
I designed the evaluation board for our experiment. On our boards, I encountered the similar problem when working on the PLL of DRS4. I compared the following two configuration process, which on with PLL locked, the other not,
Process1:
step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set DEnable high, thus do nothing but wait
I found DRS4 PLL working and locked.
Process 2:
Step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set Config. Register( "11111111" .of course, this step was not necessary, just to see whether SPI was working properly from DTAP when set to "11111110")
Step4: Set The read shift Register ( full read out mode)
Step5: Set DEnable high,
Step6: Set DWrite high , thus low it , and prepare to read the waveform.
Well, I found in this case, the PLL was not locked, I am sure there was no problem with my SPI configuration process of DRS4.
toggle from DTAP could be viewed, but not stable.
Any Suggestions ?
thanks.
|
So the main difference, if I understand correctly, is the setting of the Config Register. Actually I never tried that, I always went with the default settings (all "1"). What happens if you write "00000000"? You know Bit1 controls the PLL, maybe there is a bug and the signal needs to be inverted.
|
Hi, Stefan,
The problem was fixed by setting Reg_addr "1001" instead of "1111" when in idle state, I was confused. |
|
92
|
Fri Jun 18 11:45:18 2010 |
Stefan Ritt | DVDD Problem of DRS 4 |
| Jinhong Wang wrote: |
|
Hi Stefan
I designed the evaluation board for our experiment. On our boards, I encountered the similar problem when working on the PLL of DRS4. I compared the following two configuration process, which on with PLL locked, the other not,
Process1:
step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set DEnable high, thus do nothing but wait
I found DRS4 PLL working and locked.
Process 2:
Step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set Config. Register( "11111111" .of course, this step was not necessary, just to see whether SPI was working properly from DTAP when set to "11111110")
Step4: Set The read shift Register ( full read out mode)
Step5: Set DEnable high,
Step6: Set DWrite high , thus low it , and prepare to read the waveform.
Well, I found in this case, the PLL was not locked, I am sure there was no problem with my SPI configuration process of DRS4.
toggle from DTAP could be viewed, but not stable.
Any Suggestions ?
thanks.
|
So the main difference, if I understand correctly, is the setting of the Config Register. Actually I never tried that, I always went with the default settings (all "1"). What happens if you write "00000000"? You know Bit1 controls the PLL, maybe there is a bug and the signal needs to be inverted. |
|
91
|
Fri Jun 18 11:31:20 2010 |
Jinhong Wang | DVDD Problem of DRS 4 |
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
| Stefan Ritt wrote: |
|
| Hao Huan wrote: |
|
Hi Stefan,
on our board some DRS chips draw a lot of current through DVDD after power-up and heat up significantly--it is true that our board doesn't have weak pull-down resistors at DENABLE and DWRITE output pins of FPGA, so this problem might have been caused by that, but a reinitialization of the Domino circuit doesn't help either. We tried different capacitors at DVDD and it seemed the larger the capacitance, the better the result--with a capacitor larger than 10nF some of the DRS chips could work happily in the normal way while if the capacitor is only 4.7nF all of them got very hot. Would you please provide some suggestions why there should be such a problem?
Thanks a lot!
|
I found that sometimes even a reinitialization fails if the pull-down resistors are missing. So instead playing with capacitors at DVDD, I would just solder two resistors on the board which should fix the problem completely.
|
Thanks! After adding pull-down resistors the voltages come back to normal.
However there is another weird problem that arises: a reset pulse seems unable to set the internal shift registers to default values. For example, after reset without addressing the Config Register the PLL will not try to lock with external reference clock. Even if I explicitly address the Config Register after reset and have the PLL locked, some channels of the chip will give null output during readout while other channels work normally. Could it be that some channels are not initiated properly with the Domino circuit?
|
Something is wrong. I have 800 chips, and they all start up fine. Check with your scope the RESET, DSPEED, DENABLE and DTAP signals. When RESET is applied, DSPEED should go to 2.5 V. When DENABLE goes high, the domino wave is started and you should see DTAP toggle. DSPEED is then lowered by the PLL until DTAP matches your external reference clock. I usually keep DENABLE high all the time after initialization, so the domino wave just continues running.
Another problem could however be the chip readout. If some channel gives null output, it could be that your readout has a problem. Do you use RSRLOAD to initialize the readout sequence?
|
Yes; I used RSRLOAD to trigger readout of all channels in parallel so the asymmetry between channels of the same chip is really a big puzzle. Also during reset DSPEED indeed goes to 2.5V, but after reset the PLL will not try to lock with the external reference clock and lower DSPEED. Instead the Domino circuit just oscillates at the highest frequency by itself.
A more confusing discovery is that the SRIN level before starting the Domino wave could affect the behavior of the PLL. I mean the level of SRIN when the chip is at A="1111" or "1010". Is SRIN supposed to influence the chip even in these standby or transparent modes?
|
Just some ideas:
- Is DENABLE really kept high all the time?
- Is DRESET only applied once during initialization, after that it should stay high
- Does REFCLK+/REFCLK- really toggle at the required sampling speed / 2048?
- Is the REFCLK really a good differential signal? Note that it must be biased properly since the DRS4 inputs are high impedance
- Is the Bit1 in the Config Register really at "1" to enable the PLL?
The only way the SRIN level could affect the PLL is if you address the Config Register (A="1100") and you clock in a few bits with SRCLK.
Have you thought about 'crazy' things such as:
- Defining the DRS4 chip wronly in your CAD software so that the pins are different from what you think?
- Some soldering problem of the DRS4 chips (we had this in the past) so that some pins are not connected at all and others have shorts
I guess you checked most of the things, so I'm just wildly guessing in order to stimulate some thoughts.
The ultimate check would be to get one of the evaluation boards (I sent a few to Jean-Francois Genat some time ago...) and compare the DRS4 signals pin by pin.
|
Hi Stefan
I designed the evaluation board for our experiment. On our boards, I encountered the similar problem when working on the PLL of DRS4. I compared the following two configuration process, which on with PLL locked, the other not,
Process1:
step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set DEnable high, thus do nothing but wait
I found DRS4 PLL working and locked.
Process 2:
Step 1: Set DEnable and DWrite low,
Step2 : Reset DRS4 with a negative pulse of about 900 ns
Step3: Set Config. Register( "11111111" .of course, this step was not necessary, just to see whether SPI was working properly from DTAP when set to "11111110")
Step4: Set The read shift Register ( full read out mode)
Step5: Set DEnable high,
Step6: Set DWrite high , thus low it , and prepare to read the waveform.
Well, I found in this case, the PLL was not locked, I am sure there was no problem with my SPI configuration process of DRS4.
toggle from DTAP could be viewed, but not stable.
Any Suggestions ?
thanks. |
|