 Wed Feb 22 11:36:51 2012, sonal, DRS4- analog pulse counting Wed Feb 22 11:36:51 2012, sonal, DRS4- analog pulse counting
|
Hello Sir,
Regarding to analog pulse counting by using DRS4 Rev.2.0 board, you have said that "There is a way to perform the counting dead time free, but that requires the V4 board, which has a hardware comparator on all four channels (The V2 board has only one comparator and a multiplexer). The output of these comparators go directly to the FPGA, which can then trigger on these signals. In principle one could implement a hardware counter in the FPGA, which works practically dead time free. But this requires a new firmware which has to be written. Either you do it yourself using the Xilinx development tools, or you wait until I find some time to implement this, which could take a couple of weeks or even months."
I am interested in it. I have DRS4 Rev.2.0 board. I have FPGA and Microcontroller firmware for this board. How can I implement this concept of counting pulses?
|
 Fri Feb 24 15:52:43 2012, Stefan Ritt, DRS4- analog pulse counting Fri Feb 24 15:52:43 2012, Stefan Ritt, DRS4- analog pulse counting
|
| sonal wrote: |
|
Hello Sir,
Regarding to analog pulse counting by using DRS4 Rev.2.0 board, you have said that "There is a way to perform the counting dead time free, but that requires the V4 board, which has a hardware comparator on all four channels (The V2 board has only one comparator and a multiplexer). The output of these comparators go directly to the FPGA, which can then trigger on these signals. In principle one could implement a hardware counter in the FPGA, which works practically dead time free. But this requires a new firmware which has to be written. Either you do it yourself using the Xilinx development tools, or you wait until I find some time to implement this, which could take a couple of weeks or even months."
I am interested in it. I have DRS4 Rev.2.0 board. I have FPGA and Microcontroller firmware for this board. How can I implement this concept of counting pulses?
|
As I said above, you need a V4 board which has the four hardware comparators mounted. You cannot do that with the V2 board, even with a firmware upgrade.
The firmware upgrade for the V4 board is not yet ready and I won't have time for that in the next 3-4 weeks, but afterwards maybe.
Best regards,
Stefan |
|
Wed Feb 29 06:46:47 2012, Sonal, DRS4- analog pulse counting
|
| Stefan Ritt wrote: |
|
| sonal wrote: |
|
Hello Sir,
Regarding to analog pulse counting by using DRS4 Rev.2.0 board, you have said that "There is a way to perform the counting dead time free, but that requires the V4 board, which has a hardware comparator on all four channels (The V2 board has only one comparator and a multiplexer). The output of these comparators go directly to the FPGA, which can then trigger on these signals. In principle one could implement a hardware counter in the FPGA, which works practically dead time free. But this requires a new firmware which has to be written. Either you do it yourself using the Xilinx development tools, or you wait until I find some time to implement this, which could take a couple of weeks or even months."
I am interested in it. I have DRS4 Rev.2.0 board. I have FPGA and Microcontroller firmware for this board. How can I implement this concept of counting pulses?
|
As I said above, you need a V4 board which has the four hardware comparators mounted. You cannot do that with the V2 board, even with a firmware upgrade.
The firmware upgrade for the V4 board is not yet ready and I won't have time for that in the next 3-4 weeks, but afterwards maybe.
Best regards,
Stefan
|
Thank you for your response.
The DRS4 Rev.2.0 with one Multiplexer and a Comparator I think may be is ok for me. Since I wanted to implement counter in FPGA, I have gone through firmware but its very difficult for me to get the flow of data from DRS to USB. Could you help me to get familiar with or to get flow of the data from DRS to the USB?
Thank You,
Sonal |
|
Thu Mar 1 19:22:26 2012, Stefan Ritt, DRS4- analog pulse counting
|
| Sonal wrote: |
|
The DRS4 Rev.2.0 with one Multiplexer and a Comparator I think may be is ok for me. Since I wanted to implement counter in FPGA, I have gone through firmware but its very difficult for me to get the flow of data from DRS to USB. Could you help me to get familiar with or to get flow of the data from DRS to the USB?
|
Hi Sonai,
unfortunately I cannot teach you VHDL, you should take a course somewhere. Actually you don't have to touch the USB part, you just have to implement a new register in the firmware, and connect it to a VHDL counter attached to the trigger input. I will do this in a couple of weeks myself, so you can also just wait. I will however only do this for the V4 board, so you have to port it back to the V2 firmware.
Best regards,
Stefan |
|
Wed Mar 6 12:35:38 2013, Osip Lishilin, DRS4- analog pulse counting
|
Hello, Stefan. Have you implemented pulse counting yet?
Best, Osip. |
|
Wed Mar 6 12:37:14 2013, Stefan Ritt, DRS4- analog pulse counting
|
| Osip Lishilin wrote: |
|
Hello, Stefan. Have you implemented pulse counting yet?
Best, Osip.
|
Nope. |
|
Mon May 20 08:42:16 2013, Osip Lishilin, DRS4- analog pulse counting
|
| Stefan Ritt wrote: |
|
| Osip Lishilin wrote: |
|
Hello, Stefan. Have you implemented pulse counting yet?
Best, Osip.
|
Nope.
|
Will it be done in the foreseeable future? |
|
Sat May 25 21:03:22 2013, Stefan Ritt, DRS4- analog pulse counting
|
| Osip Lishilin wrote: |
|
| Stefan Ritt wrote: |
|
| Osip Lishilin wrote: |
|
Hello, Stefan. Have you implemented pulse counting yet?
Best, Osip.
|
Nope.
|
Will it be done in the foreseeable future?
|
Yes. I will announce it in the forum. |
|
Tue May 21 12:39:00 2013, Enrico Conti, mac osx 10.6
|
Hi,
I would like to use the DRS4 with my macbook pro running osx 10.6.8.
I have installed the wxWidgets and the libusb-1.0 libraries and I am using the Linux code vers. 4.0.1. After
compilation, the following errors come out:
ld: warning: in musbstd.o, file was built for unsupported file format which is not the architecture being linked
(i386)
ld: warning: in mxml.o, file was built for unsupported file format which is not the architecture being linked (i386)
....
....
ld: warning: in main.o, file was built for unsupported file format which is not the architecture being linked (i386)
Undefined symbols:
"_main", referenced from:
start in crt1.10.6.o
ld: symbol(s) not found
collect2: ld returned 1 exit status
make: *** [drsosc] Error 1
Do you have any idea on how to solve the problem ?? or maybe do you have a package working with osx 10.6 ? I
remember to have seen, long time ago, a package that could work with 10.6 (or 10.5 ?), but I cannot find it now
(but maybe I remember wrong).
Thanks for any help,
Enrico |
|
Tue May 21 13:25:41 2013, Stefan Ritt, mac osx 10.6
|
> Hi,
>
> I would like to use the DRS4 with my macbook pro running osx 10.6.8.
> I have installed the wxWidgets and the libusb-1.0 libraries and I am using the Linux code vers. 4.0.1. After
> compilation, the following errors come out:
>
> ld: warning: in musbstd.o, file was built for unsupported file format which is not the architecture being linked
> (i386)
> ld: warning: in mxml.o, file was built for unsupported file format which is not the architecture being linked (i386)
> ....
> ....
> ld: warning: in main.o, file was built for unsupported file format which is not the architecture being linked (i386)
> Undefined symbols:
> "_main", referenced from:
> start in crt1.10.6.o
> ld: symbol(s) not found
> collect2: ld returned 1 exit status
> make: *** [drsosc] Error 1
>
>
> Do you have any idea on how to solve the problem ?? or maybe do you have a package working with osx 10.6 ? I
> remember to have seen, long time ago, a package that could work with 10.6 (or 10.5 ?), but I cannot find it now
> (but maybe I remember wrong).
>
> Thanks for any help,
>
> Enrico
Can it be that you have a old PowerPC MAC? I have no experience with that, but probably you have to adjust the Makefile
ans set some flags correctly for PPC instead of Intel.
/Stefan |
|
Tue May 21 17:45:05 2013, Enrico Conti, mac osx 10.6
|
>
> Can it be that you have a old PowerPC MAC? I have no experience with that, but probably you have to adjust the Makefile
> ans set some flags correctly for PPC instead of Intel.
>
> /Stefan
No, I have a MacBook Pro 2.8 GHz Intel Core 2 Duo. |
|
Tue May 21 13:32:13 2013, Martin Petriska, mac osx 10.6
|
> Hi,
>
> I would like to use the DRS4 with my macbook pro running osx 10.6.8.
> I have installed the wxWidgets and the libusb-1.0 libraries and I am using the Linux code vers. 4.0.1. After
> compilation, the following errors come out:
>
> ld: warning: in musbstd.o, file was built for unsupported file format which is not the architecture being linked
> (i386)
> ld: warning: in mxml.o, file was built for unsupported file format which is not the architecture being linked (i386)
> ....
> ....
> ld: warning: in main.o, file was built for unsupported file format which is not the architecture being linked (i386)
> Undefined symbols:
> "_main", referenced from:
> start in crt1.10.6.o
> ld: symbol(s) not found
> collect2: ld returned 1 exit status
> make: *** [drsosc] Error 1
>
>
> Do you have any idea on how to solve the problem ?? or maybe do you have a package working with osx 10.6 ? I
> remember to have seen, long time ago, a package that could work with 10.6 (or 10.5 ?), but I cannot find it now
> (but maybe I remember wrong).
>
> Thanks for any help,
>
> Enrico
it looks like 64bit vs 32bit problem, you have to compile all libraries for the same architecture. Maybe, make clean to
remove all precompiled object files .o and recompile it again. Try to compile first that simple example without wxWidgets.
Martin |
|
Tue May 21 17:48:45 2013, Enrico Conti, mac osx 10.6
|
>
> it looks like 64bit vs 32bit problem, you have to compile all libraries for the same architecture. Maybe, make clean to
> remove all precompiled object files .o and recompile it again. Try to compile first that simple example without wxWidgets.
>
> Martin
Good point, but all libraries are already compiled to 32 bits, since the laptop is running at 32 bits. Unless you mean that I
have to convert to 64 bits, but this means to change all content of the PC, and I don't want to do this. Can the applications
run with 32 bits or do they need 64 ?
Thanks,
Enrico |
|
Tue May 21 17:51:09 2013, Stefan Ritt, mac osx 10.6
|
> >
> > it looks like 64bit vs 32bit problem, you have to compile all libraries for the same architecture. Maybe, make clean to
> > remove all precompiled object files .o and recompile it again. Try to compile first that simple example without wxWidgets.
> >
> > Martin
>
>
> Good point, but all libraries are already compiled to 32 bits, since the laptop is running at 32 bits. Unless you mean that I
> have to convert to 64 bits, but this means to change all content of the PC, and I don't want to do this. Can the applications
> run with 32 bits or do they need 64 ?
>
> Thanks,
> Enrico
There is no specific reason to run it on 64 bits, so just all libraries have to match, that's all. But the original Makefile has been written for 64 bits, so it might need some
adjustments.
/Stefan |
|
Tue May 21 18:30:11 2013, Enrico Conti, mac osx 10.6
|
> > >
> > > it looks like 64bit vs 32bit problem, you have to compile all libraries for the same architecture. Maybe, make clean to
> > > remove all precompiled object files .o and recompile it again. Try to compile first that simple example without wxWidgets.
> > >
> > > Martin
> >
> >
> > Good point, but all libraries are already compiled to 32 bits, since the laptop is running at 32 bits. Unless you mean that I
> > have to convert to 64 bits, but this means to change all content of the PC, and I don't want to do this. Can the applications
> > run with 32 bits or do they need 64 ?
> >
> > Thanks,
> > Enrico
>
> There is no specific reason to run it on 64 bits,
Good.
> so just all libraries have to match, that's all. But the original Makefile has been written for 64 bits, so it might need some
> adjustments.
Ok, but I don't understand where is the point to correct. 64 bits do not appear explicitally (at least to me, who am not a drake of programming ...)
neither in the Makefile neither in the (few) source files I have examined.
Thanks again,
Enrico |
|
Fri May 24 17:58:07 2013, Enrico Conti, mac osx 10.6
|
> > >
> > > it looks like 64bit vs 32bit problem, you have to compile all libraries for the same architecture. Maybe, make clean to
> > > remove all precompiled object files .o and recompile it again. Try to compile first that simple example without wxWidgets.
> > >
> > > Martin
> >
> >
> > Good point, but all libraries are already compiled to 32 bits, since the laptop is running at 32 bits. Unless you mean that I
> > have to convert to 64 bits, but this means to change all content of the PC, and I don't want to do this. Can the applications
> > run with 32 bits or do they need 64 ?
> >
> > Thanks,
> > Enrico
>
> There is no specific reason to run it on 64 bits, so just all libraries have to match, that's all. But the original Makefile has been written for 64 bits, so it might need some
> adjustments.
>
> /Stefan
Hi Stefan,
I made some progress. Understood what was wrong in the make phase. You have only to add the option -arch i386 in the CFLAGS line of the makefile.
Then the make is ok, it produces the 3 executables. drs_exam and drscl seem to work correctly.
DRSOsc.app does not work as app, in the sense that if you click it, an error message comes saying "You can't use this version of the application DRSOsc.app with
this version of Mac OS X. You have Mac OSX 10.6.8. The application requires Mac OS X 10.7 or later. "
If you execute drsosc from the terminal, the graphical window pops up, the waveform is displayed, but you don't have access to the graphical interface, no button works, you can't do
anything. To quit the app, you have to kill it from the terminal with the kill command.
But anyway is a progress with respect to yestarday.
Any idea/suggestion to overcome the above problems ? I thought it is a problem with the graphical library (xwWidgets) but I have checked it, it's ok, I have also reinstalled it
(release 2.8.12_3) but nothing changed.
PS. the chip test output (done with the drscl ) is the following (see below). Is it normal or what ? THANKS.
B0> ct
Press 'q' to quit, any other key to repeat test.
Max. frequency is 5.1 GHz
Cell error on channel 1, cell 5: -137.6 mV instead 0 mV
Chip Error!
Max. frequency is 5.1 GHz
Cell error on channel 1, cell 5: -129.4 mV instead 0 mV
Chip Error! |
|
Fri May 24 18:20:14 2013, Stefan Ritt, mac osx 10.6
|
> I made some progress. Understood what was wrong in the make phase. You have only to add the option -arch i386 in the CFLAGS line of the makefile.
> Then the make is ok, it produces the 3 executables. drs_exam and drscl seem to work correctly.
> DRSOsc.app does not work as app, in the sense that if you click it, an error message comes saying "You can't use this version of the application DRSOsc.app with
> this version of Mac OS X. You have Mac OSX 10.6.8. The application requires Mac OS X 10.7 or later. "
> If you execute drsosc from the terminal, the graphical window pops up, the waveform is displayed, but you don't have access to the graphical interface, no button works, you can't do
> anything. To quit the app, you have to kill it from the terminal with the kill command.
To run an executable as an app, you have to put it into a certain directory structure. The Makefile has the target "make app" which exactly does that. It executes following code:
DRSOsc.app: drsosc
-mkdir DRSOsc.app
-mkdir DRSOsc.app/Contents
-mkdir DRSOsc.app/Contents/MacOS
-mkdir DRSOsc.app/Contents/Resources
-mkdir DRSOsc.app/Contents/Resources/English.lproj
echo 'APPL????' > DRSOsc.app/Contents/PkgInfo
cp drsosc.xcodeproj/Info-processed.plist DRSOsc.app/Contents/Info.plist
cp drsosc DRSOsc.app/Contents/MacOS/DRSOsc
cp drsosc.xcodeproj/DRSOsc.icns DRSOsc.app/Contents/Resources
You can also do this manually. You will then see the subdirectly DRSOsc.app actually as an App icon (you don't see it as a subdirectory in the Finder). That's the way Apple has chosen to do this.
The chip test facility has been made for a certain test board we use for chip testing. It has a feature that is not present in the evaluation board. I have to disable that command there.
Best regards,
Stefan |
|
Sat May 25 12:45:46 2013, Enrico Conti, mac osx 10.6
|
> > I made some progress. Understood what was wrong in the make phase. You have only to add the option -arch i386 in the CFLAGS line of the makefile.
> > Then the make is ok, it produces the 3 executables. drs_exam and drscl seem to work correctly.
> > DRSOsc.app does not work as app, in the sense that if you click it, an error message comes saying "You can't use this version of the application DRSOsc.app with
> > this version of Mac OS X. You have Mac OSX 10.6.8. The application requires Mac OS X 10.7 or later. "
> > If you execute drsosc from the terminal, the graphical window pops up, the waveform is displayed, but you don't have access to the graphical interface, no button works, you can't do
> > anything. To quit the app, you have to kill it from the terminal with the kill command.
>
> To run an executable as an app, you have to put it into a certain directory structure. The Makefile has the target "make app" which exactly does that. It executes following code:
>
> DRSOsc.app: drsosc
> -mkdir DRSOsc.app
> -mkdir DRSOsc.app/Contents
> -mkdir DRSOsc.app/Contents/MacOS
> -mkdir DRSOsc.app/Contents/Resources
> -mkdir DRSOsc.app/Contents/Resources/English.lproj
> echo 'APPL????' > DRSOsc.app/Contents/PkgInfo
> cp drsosc.xcodeproj/Info-processed.plist DRSOsc.app/Contents/Info.plist
> cp drsosc DRSOsc.app/Contents/MacOS/DRSOsc
> cp drsosc.xcodeproj/DRSOsc.icns DRSOsc.app/Contents/Resources
>
> You can also do this manually. You will then see the subdirectly DRSOsc.app actually as an App icon (you don't see it as a subdirectory in the Finder). That's the way Apple has chosen to do this.
>
> The chip test facility has been made for a certain test board we use for chip testing. It has a feature that is not present in the evaluation board. I have to disable that command there.
>
> Best regards,
> Stefan
Hi Stefan,
yes, the makefile has already the recipe to create the app. For OSX 10.6 a obvious modification must be done in the info.plist file. Then everything goes right. Now I have the DRSOsc application
running on my mac with 10.6.
Thanks for the help.
Best regards,
Enrico |
|
Mon Apr 22 15:33:28 2013, Benjamin LeGeyt, effect of jitter/alignment between SRCLK and ADC clock
|
Hello!
let me apologize in advance if this has already been covered somewhere and I missed it.
I have a question about a statement made regarding the ADC clock in the evaluation board v4.0 manual. At the bottom or page 23 there is a mention of jitter between the SRCLK signal and the ADC clock causing a baseline variation in the sampled output of up to a few mV. Is there any more information out there about this? I find this confusing for the following reason: If the DRS output has mostly settled after 28ns and the signal that is being sampled is a DC signal, I don't understand why an aperture jitter in the sampling ADC should cause a voltage error in the measured signal. I already know about the possibility of noise spikes every 32 samples if these clocks are not properly aligned, though I don't know the origin of those spikes. are these two things related?
Many Thanks!
|
Mon Apr 22 15:52:53 2013, Stefan Ritt, effect of jitter/alignment between SRCLK and ADC clock 
|
| Benjamin LeGeyt wrote: |
|
Hello!
let me apologize in advance if this has already been covered somewhere and I missed it.
I have a question about a statement made regarding the ADC clock in the evaluation board v4.0 manual. At the bottom or page 23 there is a mention of jitter between the SRCLK signal and the ADC clock causing a baseline variation in the sampled output of up to a few mV. Is there any more information out there about this? I find this confusing for the following reason: If the DRS output has mostly settled after 28ns and the signal that is being sampled is a DC signal, I don't understand why an aperture jitter in the sampling ADC should cause a voltage error in the measured signal. I already know about the possibility of noise spikes every 32 samples if these clocks are not properly aligned, though I don't know the origin of those spikes. are these two things related?
Many Thanks!
|
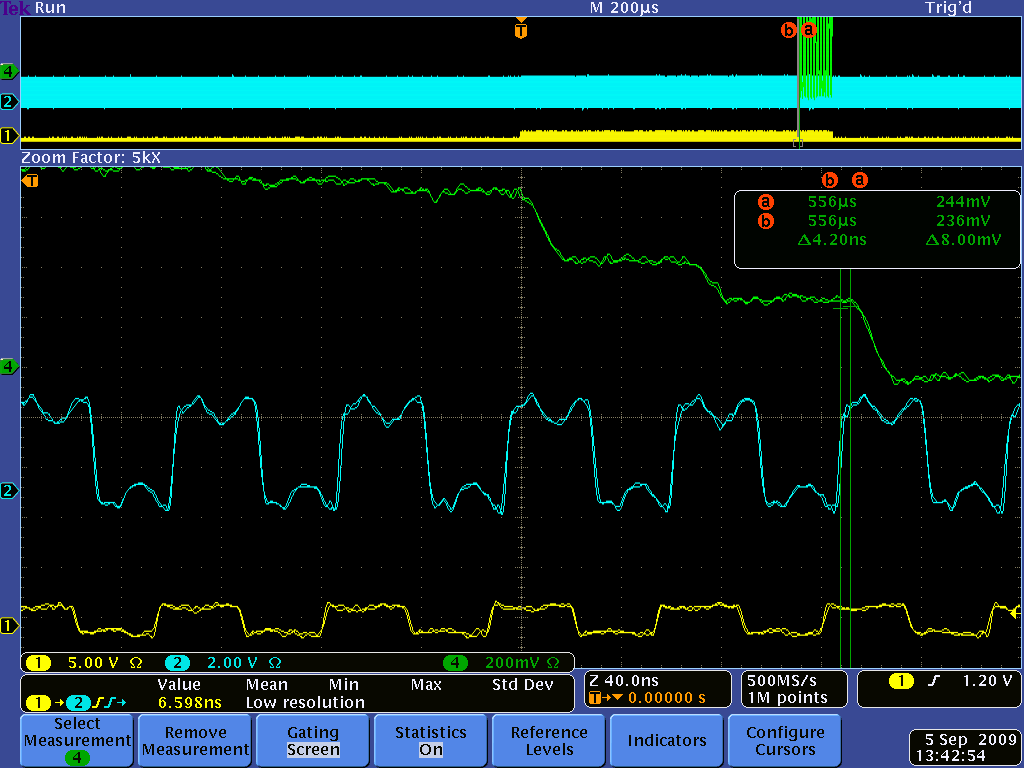
Hi Benjamin,
In principle you are right, for a DC signal that should not matter. But in reality the DRS4 output signal is not constant even for a DC signal. When you switch from one sampling cell to another during readout, there is something called "charge injection". This causes the output to change up to several 10 mV. After 28 ns this is mostly settled, but not completely, since the DRS4 output driver has a relatively low bandwidth (~50 MHz). Furthermore, the signal line between the DRS4 and the ADC is not terminated, so you have some reflections going forth and back. In addition, you have some crosstalk from the SRCLK signal. So it's better that you sample on each cycle at exactly the same time. Here you see a plot of that (green: DRS4 output, blue: ADC clock, yellow SRCLK):
|
|
Thu Apr 11 22:41:13 2013, Bill Ashmanskas, code/details for optimal DRS4 timing calibration?
|
Hi Stefan,
Is either some example code or a detailed written description available for the improved DRS4 timing-calibration algorithm described by Daniel Stricker-Shaver at MIC 2012? I think you told me that you had verified the results with your own test set-up, so I figure there must be at least two sets of code in existence to implement this calibration. (I have Daniel's presentation slides.)
I managed to find a ping-pong distribution of cell widths that looks quite similar to that shown in Daniel's slides, using an algorithm similar to the technique one uses to find radial offsets in a tracking chamber (i.e. using residuals weighted by track slope), but I'd rather use the method with which you and Daniel have already found good results. (The attached graph shows in black the histogram of cell widths for essentially the algorithm used in DRS.cpp/DRSBoard::AnalyzeWF, and in blue the histogram of cell widths extracted from the slope-weighted residuals for a periodic reference signal.)
By the way, since Daniel finds a FWHM coincidence-timing resolution around 20-25ps at 5 GSPS (for perfectly identical pulses), should I expect a FWHM resolution (for synthesized, ideal pulses) of around 50-65ps at 2 GSPS?
(I'm posting here instead of writing you both privately because I figure there may be broader interest in Daniel's algorithm.)
-Bill
|
|
Fri Apr 12 08:38:17 2013, Stefan Ritt, code/details for optimal DRS4 timing calibration?
|
| Bill Ashmanskas wrote: |
|
Hi Stefan,
Is either some example code or a detailed written description available for the improved DRS4 timing-calibration algorithm described by Daniel Stricker-Shaver at MIC 2012? I think you told me that you had verified the results with your own test set-up, so I figure there must be at least two sets of code in existence to implement this calibration. (I have Daniel's presentation slides.)
I managed to find a ping-pong distribution of cell widths that looks quite similar to that shown in Daniel's slides, using an algorithm similar to the technique one uses to find radial offsets in a tracking chamber (i.e. using residuals weighted by track slope), but I'd rather use the method with which you and Daniel have already found good results. (The attached graph shows in black the histogram of cell widths for essentially the algorithm used in DRS.cpp/DRSBoard::AnalyzeWF, and in blue the histogram of cell widths extracted from the slope-weighted residuals for a periodic reference signal.)
By the way, since Daniel finds a FWHM coincidence-timing resolution around 20-25ps at 5 GSPS (for perfectly identical pulses), should I expect a FWHM resolution (for synthesized, ideal pulses) of around 50-65ps at 2 GSPS?
(I'm posting here instead of writing you both privately because I figure there may be broader interest in Daniel's algorithm.)
-Bill
|
Hi Bill,
there are several reasons why we have not yet published Daniel's method (I'm in constant contact with him).
1. The method still changes, becomes simpler and more accurate. Originally he used sine waves with varying frequency, which you only get from an external function oscillator. Currently, we found that a single frequency could do a similar, maybe even better job. The current result is much better than the 20-25ps quoted at MIC 2012.
2. Daniel found out that for the ultimate resolution you have to calibrate each channel inside a chip separately. I do understand in meantime the reason for that. So I plan for a V5 evaluation board, which contains means of sending a log-jitter clock to all channels. This board is in test phase and will be made available once it's working as expected.
So my plan is to finish the V5 board and implement the best possible timing calibration on it. Daniel achieved already <5 ps RMS (!) independent of the delay between the two optimal pulses (up to 50 ns). This is actually better than what you can do with a high-end oscilloscope, since scopes have internal interleaving and similar problems due to aliasing etc. than the DRS chip, but scope manufacturers do not put such an emphasis on accurate timing measurements. Once we can reproduce the 5 ps result with the evaluation board, we will publish it. When we found the optimal method, we plan to write a paper about it and explain everything in great detail. We will also be at Seoul for MIC 2013. I'm topic convener there for the session "Digitalization, Acquisition, and Signal Processing Technologies". So probably we will put the DRS4 timing talk there, since it's of more general interest not only to medical applications (and honestly, for a 150 ps TOF-PET you do not need a 5 ps electronics resolution). So stay tuned!
/Stefan |
|
Mon Apr 8 18:11:02 2013, Dmitry Hits, binary to root
|
Hi,
Does anyone has a program that converts a binary file from drsosc output to a ROOT tree format?
Thank you,
Dmitry. |
|
Mon Mar 25 11:12:53 2013, Georg Winner, Differences in Source Code
|
I have noticed some differences in the source code between Windows (4.0.0) and Linux (4.0.1) Version.
drs_exam.cpp: In the windows version when setting the trigger there is no part "if (b->GetBoardType() == 8) {...} else {...}" like in Linux version. So under Windows drs_exam does not start readout of DRS 4 Evalutation Board V4, because it does not get the trigger, under linux the board can be read out succesfull. I have found out, that adding the missing part solves the problem for the windows version.
drs.cpp (Windows Version), line 2101, function "int DRSBoard::SetTriggerDelayNs(int delay)":
There is no operation which calculates the variable "fTriggerDelayNs" out of variable "ticks" like in function "int DRSBoard::SetTriggerDelayPercent(int delay)" (Line 2073). So "fTriggerDelayNs" can get diverse values when using one of the Trigger Setting Functions. Was this intended?
|
|
Thu Apr 4 11:21:04 2013, Stefan Ritt, Differences in Source Code
|
| Georg Winner wrote: |
|
I have noticed some differences in the source code between Windows (4.0.0) and Linux (4.0.1) Version.
drs_exam.cpp: In the windows version when setting the trigger there is no part "if (b->GetBoardType() == 8) {...} else {...}" like in Linux version. So under Windows drs_exam does not start readout of DRS 4 Evalutation Board V4, because it does not get the trigger, under linux the board can be read out succesfull. I have found out, that adding the missing part solves the problem for the windows version.
drs.cpp (Windows Version), line 2101, function "int DRSBoard::SetTriggerDelayNs(int delay)":
There is no operation which calculates the variable "fTriggerDelayNs" out of variable "ticks" like in function "int DRSBoard::SetTriggerDelayPercent(int delay)" (Line 2073). So "fTriggerDelayNs" can get diverse values when using one of the Trigger Setting Functions. Was this intended?
|
Thanks for reporting the problem in drs_exam.cpp. The windows and linux versions sometimes differ a bit. I'm working right now on a complete new version, wich will bring both together again.
Concerning fTriggerDelayNs and ticks, they are correlated. One tick is a single delay unit in the FPGA. On the newest boards the unit is 4.8ns long. So
ticks = fTriggerDelayNs / 4.8
fTriggerDelayNs = ticks * 4.8
fTriggerDelayNs gets set at the first line of SetTriggerDelayNs:
int DRSBoard::SetTriggerDelayNs(int delay)
/* set trigger delay in nanoseconds */
{
short ticks, reg;
fTriggerDelayNs = delay;
So I cannot see how fTriggerDelayNS should get diverse values?
|
|
Wed Feb 27 13:47:32 2013, Georg Winner, Chip Test - Cell Error
|
When starting Chip Test in DRS Command Line Interface, I receive the following message:
Cell error on channel 1, cell 5: -154.4 mV instead 0 mV
Chip Error!
What does this mean? The maximal peak-to-peak Amplitude given to channel was for a short time 10V.
The graphical interface shows no artefacts when using channel 1.
|
|
Wed Mar 6 13:08:03 2013, Stefan Ritt, Chip Test - Cell Error
|
| Georg Winner wrote: |
|
When starting Chip Test in DRS Command Line Interface, I receive the following message:
Cell error on channel 1, cell 5: -154.4 mV instead 0 mV
Chip Error!
What does this mean? The maximal peak-to-peak Amplitude given to channel was for a short time 10V.
The graphical interface shows no artefacts when using channel 1.
|
The "Chip Test" command is made for a special test board we use for chip testing. This command will not work with the evaluation board, since only four of the 8 DRS channels are connected there. So just ignore it and verify the board functionality by looking at the graphical interface.
/Stefan |
|
Thu Feb 28 10:47:14 2013, Dmitry Hits, clock and trigger outs
|
Hi,
I am considering using the DRS4 evaluation board as an ADC card for the wire chamber in the physics lab (VP) experiment at ETH. However, the wire
chamber has 8 outputs, so I would need to have two of such boards. Is it possible to synchronise them, online or offline? From the website, it looks
like yes, but the documentation says that these features (trigger and clock out) may not have been implemented in firmware yet. Could you tell me
the status?
Thank you very much,
Dmitry. |
|
Thu Feb 28 12:58:44 2013, Stefan Ritt, clock and trigger outs
|
> Hi,
> I am considering using the DRS4 evaluation board as an ADC card for the wire chamber in the physics lab (VP) experiment at ETH. However, the wire
> chamber has 8 outputs, so I would need to have two of such boards. Is it possible to synchronise them, online or offline? From the website, it looks
> like yes, but the documentation says that these features (trigger and clock out) may not have been implemented in firmware yet. Could you tell me
> the status?
>
> Thank you very much,
>
> Dmitry.
I'm right now working on it. If you only need 2-3 ns accuracy between the two boards then you can do this already now without firmware upgrade. The software for this is in principle ready, but I have to
finish the documentation. Since I'm on a business travel right now this might take me some time (weeks?).
If you want better timing (O(100ps)) between the boards, then you will need a firmware update. Or you wait until we ship boards with the new firmware. I will announce this through this forum.
Stefan |
|
Fri Feb 22 11:46:17 2013, Yury Golod, DRS4 trigger, different polarity
|
I need to synchronize two signals. These signals have a different polarity.
I can set triggers on different levels. But I can't set different polarity of triggers.
Now I can set (T1 and T2), I need to set (T1 and (not T2))
Is it possible?
d->SetTriggerLevel(-0.4,0.4,0.0,0.0,false);
d->EnableTrigger(1, 0); // Enable trigger
d->SetTriggerSource(1<<8 | 1<<9); // T1 and T2
file DRS.cpp:
int DRSBoard::SetTriggerLevel(double voltage1,double voltage2, double voltage3,double voltage4,bool negative)
{
…
SetDAC(fDAC_TLEVEL1, voltage1/2 + 0.8);
SetDAC(fDAC_TLEVEL2, voltage2/2 + 0.8);
…
|
|
Fri Feb 22 11:56:57 2013, Stefan Ritt, DRS4 trigger, different polarity
|
| Yury Golod wrote: |
|
I need to synchronize two signals. These signals have a different polarity.
I can set triggers on different levels. But I can't set different polarity of triggers.
Now I can set (T1 and T2), I need to set (T1 and (not T2))
Is it possible?
d->SetTriggerLevel(-0.4,0.4,0.0,0.0,false);
d->EnableTrigger(1, 0); // Enable trigger
d->SetTriggerSource(1<<8 | 1<<9); // T1 and T2
file DRS.cpp:
int DRSBoard::SetTriggerLevel(double voltage1,double voltage2, double voltage3,double voltage4,bool negative)
{
…
SetDAC(fDAC_TLEVEL1, voltage1/2 + 0.8);
SetDAC(fDAC_TLEVEL2, voltage2/2 + 0.8);
…
|
There is no way to select different polarities, it is not implemented in the firmware. Like your digital oscilloscope has also only one polarity switch.
The only way to do it is to use a (passive) inverter, so that you have two signals of the same polarity. Something like this:
http://www.phillipsscientific.com/pdf/460ds.pdf
|
|
Wed Feb 13 16:58:40 2013, Martin Petriska, Nonuniform sampling
|
Are there any plans to include reconstruction of nonuniform sampling in DRS4 to get uniformly sampled data?
Im now reading article IEEE Trans on Circ. ans Systems I, Vol.55 No.8 sept. 2008 Reconstruction of Nonuniformly Sampled Bandlimited Signals Usinga Differentiator–Multiplier Cascade by Stefan Tertinek and Christian Vogel
and plan to implement it, but may be somebody has it done before me.
|
|
Wed Feb 13 17:03:53 2013, Stefan Ritt, Nonuniform sampling
|
| Martin Petriska wrote: |
|
Are there any plans to include reconstruction of nonuniform sampling in DRS4 to get uniformly sampled data?
Im now reading article IEEE Trans on Circ. ans Systems I, Vol.55 No.8 sept. 2008 Reconstruction of Nonuniformly Sampled Bandlimited Signals Usinga Differentiator–Multiplier Cascade by Stefan Tertinek and Christian Vogel
and plan to implement it, but may be somebody has it done before me.
|
Interesting paper. I was not aware of this method. Sounds interesting. AFAIK, nobody has implemented it so far.
My (old) plan was to linearly interpolate samples (something you could do in an FPGA as well), but this will introduce (small) errors. The next best thing would be to do some spline interpolation, but this is time consuming and not suited for an FPGA.
If you get good results with the method above, please let others know about it.
/Stefan |
|
Thu Dec 27 00:12:12 2012, Jinhong Wang, variation of sampling capacitors
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong |
|
Thu Dec 27 09:49:17 2012, Stefan Ritt, variation of sampling capacitors
|
| Jinhong Wang wrote: |
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong
|
The capacitors sample the input voltage, not the charge, so the actual size of the capacitors does not matter on first order (the variations might be in the order of 5%). A bigger effect is the variation of the analog switches in the front of the capacitors, which is about 15%. So the actual bandwidth each cell sees varies by maybe 20% (given by the R and the C), but this comes only into play when sampling steep edges.
Stefan |
|
Thu Dec 27 18:15:14 2012, Jinhong Wang, variation of sampling capacitors
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong
|
The capacitors sample the input voltage, not the charge, so the actual size of the capacitors does not matter on first order (the variations might be in the order of 5%). A bigger effect is the variation of the analog switches in the front of the capacitors, which is about 15%. So the actual bandwidth each cell sees varies by maybe 20% (given by the R and the C), but this comes only into play when sampling steep edges.
Stefan
|
Great to know this! Thanks~
Jinhong |
|
Fri Feb 1 17:43:48 2013, Jinhong Wang, variation of sampling capacitors
|
| Jinhong Wang wrote: |
|
| Stefan Ritt wrote: |
|
| Jinhong Wang wrote: |
|
Hi Stefan,
A quick question, what is the typical variation of the sampling capacitors in DRS4? Will this variation be significant to affect your sampling result?
Best,
Jinhong
|
The capacitors sample the input voltage, not the charge, so the actual size of the capacitors does not matter on first order (the variations might be in the order of 5%). A bigger effect is the variation of the analog switches in the front of the capacitors, which is about 15%. So the actual bandwidth each cell sees varies by maybe 20% (given by the R and the C), but this comes only into play when sampling steep edges.
Stefan
|
Great to know this! Thanks~
Jinhong
|
Hi Dr. Stefan,
So the sampling capacitors store the input voltage instead of the charge. What about the readout circuits? I saw there is a buffer followed each sampling capacitor. Do you buffer the charge (like a charge sensitive amplifier) or the voltage? From Fig.12, 14 in datasheet, it seems most probably the readout is a charging or discharging of a capacitor. Could you please add some comments on this?
Cheers,
Jinhong |
|
Tue Feb 5 14:38:35 2013, Stefan Ritt, variation of sampling capacitors
|
| Jinhong Wang wrote: |
|
Hi Dr. Stefan,
So the sampling capacitors store the input voltage instead of the charge. What about the readout circuits? I saw there is a buffer followed each sampling capacitor. Do you buffer the charge (like a charge sensitive amplifier) or the voltage? From Fig.12, 14 in datasheet, it seems most probably the readout is a charging or discharging of a capacitor. Could you please add some comments on this?
Cheers,
Jinhong
|
The buffer buffers the voltage, not the charge. The curves in Fig. 12, 14 indicate that the voltage followers take some time until they settle.
Stefan |
|
Thu Dec 6 09:23:36 2012, Martin Petriska, EVM rev4 board trigger change and drs_example
|
I switched from rev 3 to rev 4 board, but have some problems with triggering, board is now waiting for trigger (rev.3 is working). How to do in drs_exam.cpp for example triggering on Ch0 && CH1 ?
Software 4.0.0, windows version.
Here is old trigger initialisation:
b->EnableTrigger(0,1);
b->SetTriggerSource(0);
b->SetTriggerLevel(0.25, false);
b->SetTriggerDelayNs(0);
Btw. Is it possible to set up different trigger Levels for each channel ?
(If there is some interest here is my code in Qt, still aplha) http://sourceforge.net/p/qtpals/code |
|
Fri Dec 14 21:49:29 2012, Stefan Ritt, EVM rev4 board trigger change and drs_example
|
| Martin Petriska wrote: |
|
I switched from rev 3 to rev 4 board, but have some problems with triggering, board is now waiting for trigger (rev.3 is working). How to do in drs_exam.cpp for example triggering on Ch0 && CH1 ?
Software 4.0.0, windows version.
Here is old trigger initialisation:
b->EnableTrigger(0,1);
b->SetTriggerSource(0);
b->SetTriggerLevel(0.25, false);
b->SetTriggerDelayNs(0);
Btw. Is it possible to set up different trigger Levels for each channel ?
(If there is some interest here is my code in Qt, still aplha) http://sourceforge.net/p/qtpals/code
|
Sorry the late reply.
In V4, triggering has changed. You can trigger now on an OR or AND of channels. Therefore you have to supply a bitmask, where the 1st bit = CH1, 2nd bit = CH2 and so on. Have a look at the most recent drs_exam. It contains code:
/* use following lines to enable hardware trigger on CH1 at 50 mV positive edge */
if (b->GetBoardType() == 8) { // Evaluaiton Board V4
b->EnableTrigger(1, 0); // enable hardware trigger
b->SetTriggerSource(1<<0); // set CH1 as source
} else { // Evaluation Board V3
b->EnableTrigger(0, 1); // lemo off, analog trigger on
b->SetTriggerSource(0); // use CH1 as source
}
So if you want CH1 && CH2, you look at the source code of SetTriggerSource. It contains
// Set trigger configuration
// OR 0=CH1, 1=CH2, 2=CH3, 3=CH4, 4=EXT
// AND 8=CH1, 9=CH2, 10=CH3, 11=CH4, 12=EXT
So an AND between CH1 and CH2 needs a
b->SetTriggerSource(1<<8 | 1<<9);
Your code looks interesting. Do you have a screenshot or can you explain what it does? |
|
Thu Dec 13 12:03:29 2012, Evgeni, DRS-4 trigger
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal). |
|
Thu Dec 13 12:14:35 2012, Stefan Ritt, DRS-4 trigger
|
| Evgeni wrote: |
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal).
|
Sorry, I don't understand that question. The DRS4 Evaluation board input signal range is 1V. If you have larger signals, you have to attenuante them externally.
/Stefan |
|
Thu Dec 13 19:49:47 2012, Evgeni, DRS-4 trigger
|
| Stefan Ritt wrote: |
|
| Evgeni wrote: |
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal).
|
Sorry, I don't understand that question. The DRS4 Evaluation board input signal range is 1V. If you have larger signals, you have to attenuante them externally.
/Stefan
|
Can I adjust the internal trigger DRS oscilloscope for signal extraction 0.5 volts (for example) from any of the four channels. In our case, there is a lot of noise with low amplitude, which must be removed during the registration. We need to record the individual pulses of higher amplitude than the noise. So we want to use the internal trigger DRS oscilloscope to cut this noise by setting up its threshold amplitude noise.
|
|
Fri Dec 14 08:42:53 2012, Stefan Ritt, DRS-4 trigger
|
| Evgeni wrote: |
|
| Stefan Ritt wrote: |
|
| Evgeni wrote: |
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal).
|
Sorry, I don't understand that question. The DRS4 Evaluation board input signal range is 1V. If you have larger signals, you have to attenuante them externally.
/Stefan
|
Can I adjust the internal trigger DRS oscilloscope for signal extraction 0.5 volts (for example) from any of the four channels. In our case, there is a lot of noise with low amplitude, which must be removed during the registration. We need to record the individual pulses of higher amplitude than the noise. So we want to use the internal trigger DRS oscilloscope to cut this noise by setting up its threshold amplitude noise.
|
Sure, you can set the trigger level with the vertical slider (see attached figure). The trigger level works form -0.5V to +0.5V. Just like with a normal oscilloscope. I thought this would be obvious... |
|
Fri Dec 14 10:07:54 2012, Evgeni, DRS-4 trigger
|
| Stefan Ritt wrote: |
|
| Evgeni wrote: |
|
| Stefan Ritt wrote: |
|
| Evgeni wrote: |
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal).
|
Sorry, I don't understand that question. The DRS4 Evaluation board input signal range is 1V. If you have larger signals, you have to attenuante them externally.
/Stefan
|
Can I adjust the internal trigger DRS oscilloscope for signal extraction 0.5 volts (for example) from any of the four channels. In our case, there is a lot of noise with low amplitude, which must be removed during the registration. We need to record the individual pulses of higher amplitude than the noise. So we want to use the internal trigger DRS oscilloscope to cut this noise by setting up its threshold amplitude noise.
|
Sure, you can set the trigger level with the vertical slider (see attached figure). The trigger level works form -0.5V to +0.5V. Just like with a normal oscilloscope. I thought this would be obvious...
|
That's it? Thank you for your comprehensive answer. |
|
Fri Dec 14 10:07:14 2012, Evgeni, DRS-4 trigger
|
| Evgeni wrote: |
|
How to configure DRS oscilloscope for the oscillations with an amplitude greater than the value of the exposed
in the trigger (internal).
|
|
|
Tue Dec 4 09:24:22 2012, Zhongwei Du, Question of drs4 using
|
When Denable and Dwrite is high , the voltage of PLLOUT is 0 V. And the Dtap is turn high with no delay when the Denable turns high.
After power up and configuration(the WSR,WCR,CR are all set to 11111111), the readout data is no change whenever the input analog signal and rofs,bias,oofs changes. I have test useing the DAC to supply the Dspeed voltage, and change a new DRS4 chip, but all is the same. The readout data is strange : the first about 100 cells is rise or fall and the last 900 cells is out of the range of ADC.
So how should I do for debugging the drs4 now. |
|
Tue Dec 4 09:39:44 2012, Stefan Ritt, Question of drs4 using
|
| Zhongwei Du wrote: |
|
When Denable and Dwrite is high , the voltage of PLLOUT is 0 V. And the Dtap is turn high with no delay when the Denable turns high.
After power up and configuration(the WSR,WCR,CR are all set to 11111111), the readout data is no change whenever the input analog signal and rofs,bias,oofs changes. I have test useing the DAC to supply the Dspeed voltage, and change a new DRS4 chip, but all is the same. The readout data is strange : the first about 100 cells is rise or fall and the last 900 cells is out of the range of ADC.
So how should I do for debugging the drs4 now.
|
The first thing to make work is to have DTAP oscillating with fsamp/2048. Keep Denable and Dwrite low (required during power-on, see elog:10), set Dspeed to 2.5V, then rise Denable and Dwrite. You should see Dtap toggling at about 2.4 MHz. If not, double check all supply voltages, and especially all soldering points. The QFN package is a bit hard to solder.
/Stefan |
|
Tue Dec 4 09:50:11 2012, Zhongwei Du, Question of drs4 using
|
| Stefan Ritt wrote: |
|
| Zhongwei Du wrote: |
|
When Denable and Dwrite is high , the voltage of PLLOUT is 0 V. And the Dtap is turn high with no delay when the Denable turns high.
After power up and configuration(the WSR,WCR,CR are all set to 11111111), the readout data is no change whenever the input analog signal and rofs,bias,oofs changes. I have test useing the DAC to supply the Dspeed voltage, and change a new DRS4 chip, but all is the same. The readout data is strange : the first about 100 cells is rise or fall and the last 900 cells is out of the range of ADC.
So how should I do for debugging the drs4 now.
|
The first thing to make work is to have DTAP oscillating with fsamp/2048. Keep Denable and Dwrite low (required during power-on, see elog:10), set Dspeed to 2.5V, then rise Denable and Dwrite. You should see Dtap toggling at about 2.4 MHz. If not, double check all supply voltages, and especially all soldering points. The QFN package is a bit hard to solder.
/Stefan
|
"Keep Denable and Dwrite low (required during power-on, see elog:10), set Dspeed to 2.5V, then rise Denable and Dwrite. You should see Dtap toggling at about 2.4 MHz. "
In this process , should i config any registers( WSR,WCR,CR ) ? |
|
Tue Dec 4 09:55:43 2012, Stefan Ritt, Question of drs4 using
|
| Zhongwei Du wrote: |
|
| Stefan Ritt wrote: |
|
| Zhongwei Du wrote: |
|
When Denable and Dwrite is high , the voltage of PLLOUT is 0 V. And the Dtap is turn high with no delay when the Denable turns high.
After power up and configuration(the WSR,WCR,CR are all set to 11111111), the readout data is no change whenever the input analog signal and rofs,bias,oofs changes. I have test useing the DAC to supply the Dspeed voltage, and change a new DRS4 chip, but all is the same. The readout data is strange : the first about 100 cells is rise or fall and the last 900 cells is out of the range of ADC.
So how should I do for debugging the drs4 now.
|
The first thing to make work is to have DTAP oscillating with fsamp/2048. Keep Denable and Dwrite low (required during power-on, see elog:10), set Dspeed to 2.5V, then rise Denable and Dwrite. You should see Dtap toggling at about 2.4 MHz. If not, double check all supply voltages, and especially all soldering points. The QFN package is a bit hard to solder.
/Stefan
|
"Keep Denable and Dwrite low (required during power-on, see elog:10), set Dspeed to 2.5V, then rise Denable and Dwrite. You should see Dtap toggling at about 2.4 MHz. "
In this process , should i config any registers( WSR,WCR,CR ) ?
|
After power-up reset, these registers are all set to "1", which should be ok to start.
BTW, Jinhong Wang <wangjinh@mail.ustc.edu.cn> from your institute hast the chip correctly working. Maybe he can help you in a more direct way than I can.
|
|
Mon Dec 3 08:32:28 2012, Gyuhee Kim, Another question about using multi boards.
|
Hi.
I asked about using multi boards some days ago, and I got answer to use external trigger. (Thanks Stefan!)
And here is another question. I made two external triggers and try to acquire coincidence data using two boards. but DRS Oscilloscope program can connect only one board and don`t acquire both of them simultaneously.
So I tried to use two computer for each board separately, but, well, you already know, I failed to acquire because two computers don`t promise to synchronize the two boards acquisition.
Is there any method to solve this problem?
1. I want to acquire coincidence data from the two DRS 4 Evaluation board V4 simultaneosly.
2. I have external trigger to provide the two boards at the same time.
3. How can I get data from the two boards?
Best regards.
Gyuhee. |
|
Mon Dec 3 09:18:09 2012, Stefan Ritt, Another question about using multi boards.
|
| Gyuhee Kim wrote: |
|
Hi.
I asked about using multi boards some days ago, and I got answer to use external trigger. (Thanks Stefan!)
And here is another question. I made two external triggers and try to acquire coincidence data using two boards. but DRS Oscilloscope program can connect only one board and don`t acquire both of them simultaneously.
So I tried to use two computer for each board separately, but, well, you already know, I failed to acquire because two computers don`t promise to synchronize the two boards acquisition.
Is there any method to solve this problem?
1. I want to acquire coincidence data from the two DRS 4 Evaluation board V4 simultaneosly.
2. I have external trigger to provide the two boards at the same time.
3. How can I get data from the two boards?
Best regards.
Gyuhee.
|
You have to write your own program. DRS Oscilloscope does not (yet) support this. Take drs_exam.cpp as a starting point and try to extend it to two boards. One tricky point is that the external trigger may only fire AFTER the two boards have been read out. So you need some means of re-enabling the external trigger after you read out both boards.
Stefan |
|
Mon Dec 3 11:40:35 2012, Gyuhee Kim, Another question about using multi boards.
|
| Stefan Ritt wrote: |
|
| Gyuhee Kim wrote: |
|
Hi.
I asked about using multi boards some days ago, and I got answer to use external trigger. (Thanks Stefan!)
And here is another question. I made two external triggers and try to acquire coincidence data using two boards. but DRS Oscilloscope program can connect only one board and don`t acquire both of them simultaneously.
So I tried to use two computer for each board separately, but, well, you already know, I failed to acquire because two computers don`t promise to synchronize the two boards acquisition.
Is there any method to solve this problem?
1. I want to acquire coincidence data from the two DRS 4 Evaluation board V4 simultaneosly.
2. I have external trigger to provide the two boards at the same time.
3. How can I get data from the two boards?
Best regards.
Gyuhee.
|
You have to write your own program. DRS Oscilloscope does not (yet) support this. Take drs_exam.cpp as a starting point and try to extend it to two boards. One tricky point is that the external trigger may only fire AFTER the two boards have been read out. So you need some means of re-enabling the external trigger after you read out both boards.
Stefan
|
That`s very bad news for me. I don`t have much time to study & write C programming...
Anyway, Thank you very much Stefan.
Best regards.
Gyuhee. |
|
Wed Nov 28 16:54:46 2012, Stefan Ritt, DRS Oscilloscope for Raspberry Pi and Mac OSX 10.8
|
I made a pre-compiled package for Mac OSX 10.8 (Mountain Lion), so one should be able to install the DRS Oscilloscope software with one mouse click on a recent Mac.
The Makefile in the tar ball now also supports OSX 10.8, so one could even compile it from the sources on a Mac, after libusb-1.0 and wxWidgets have been installed. That might then also work on older versions of OSX.
In addition, the software has been adaptes so that it compiles nicely on a Raspberry Pi (http://www.raspberrypi.org), a screenshot has been attached. Together with a Raspberry Pi and an old screen, the evaluation board is one of the cheapest available oscilloscopes.
|
|
Wed Nov 21 08:34:52 2012, Gyuhee Kim, Question for using Multi board
|
Hi.
I have 2 DRS4 evaluation V4 boards, and I want to use these 2 board to multi board DAQ system for 4 ch vs 4 ch DAQ.
But there is no option for multi board use. I just only find the multi board trigger mode check button on DRS4 Oscilloscope program, but I couldn`t check.
Is there any method to use multi board?
Best regards.
Gyuhee. |
|
Wed Nov 21 08:38:26 2012, Stefan Ritt, Question for using Multi board
|
| Gyuhee Kim wrote: |
|
Hi.
I have 2 DRS4 evaluation V4 boards, and I want to use these 2 board to multi board DAQ system for 4 ch vs 4 ch DAQ.
But there is no option for multi board use. I just only find the multi board trigger mode check button on DRS4 Oscilloscope program, but I couldn`t check.
Is there any method to use multi board?
Best regards.
Gyuhee.
|
This mode is not yet implemented in firmware. Maybe I find some time towards the end of this year to add this. At the moment, you have to build and external trigger to synchronize the two boards. There are also 16-channel boards on the market where you would not need a multi-board mode. Just Google for "DT5742".
/Stefan |
|
Wed Nov 21 08:48:00 2012, Gyuhee Kim, Question for using Multi board
|
| Stefan Ritt wrote: |
|
| Gyuhee Kim wrote: |
|
Hi.
I have 2 DRS4 evaluation V4 boards, and I want to use these 2 board to multi board DAQ system for 4 ch vs 4 ch DAQ.
But there is no option for multi board use. I just only find the multi board trigger mode check button on DRS4 Oscilloscope program, but I couldn`t check.
Is there any method to use multi board?
Best regards.
Gyuhee.
|
This mode is not yet implemented in firmware. Maybe I find some time towards the end of this year to add this. At the moment, you have to build and external trigger to synchronize the two boards. There are also 16-channel boards on the market where you would not need a multi-board mode. Just Google for "DT5742".
/Stefan
|
Thanks Stefan.
I will build external trigger system. |
|
Mon Oct 29 18:30:28 2012, Martin Petriska, GetWave
|
I have some question according to GetWave function. In drs_exam.cpp simple GetWave(0,0,wave_array[]) etc...is used. Is there primary (cell) calibration, secondary calibration (Readout) and remove Spikes used, as in DRS Oscilloscope application? |
|
Tue Nov 13 11:26:32 2012, Stefan Ritt, GetWave
|
| Martin Petriska wrote: |
|
I have some question according to GetWave function. In drs_exam.cpp simple GetWave(0,0,wave_array[]) etc...is used. Is there primary (cell) calibration, secondary calibration (Readout) and remove Spikes used, as in DRS Oscilloscope application?
|
Yes, yes, no. To get spike removals, you need the function RemoveSpikes from Osci.cpp in the DRSOsc project. |
|
Thu Nov 1 20:08:33 2012, hongwei yang, DRS4 firmware
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point? Or is there any drs4_eval4_app.vhd missing in the source files?
thanks
Hongwei |
|
Thu Nov 1 20:17:42 2012, Stefan Ritt, DRS4 firmware
|
| hongwei yang wrote: |
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point?
thanks
Hongwei
|
The "and" in the trigger section means now "coincidence". So the V4 board can trigger on a coincidence between two or more channels. If there is no pulse at the same time on the coincidence channels, the board will of course not trigger. The according firmware was introduced in V4, so please look at drs4_eval4_app.vhd (not eval3).
I just realized that the V4 firmware might be missing in the distribution, so I have attached it here. Look for drs_ctl_trigger_config.
Best regards,
Stefan |
|
Thu Nov 1 20:21:44 2012, hongwei yang, DRS4 firmware
|
| Stefan Ritt wrote: |
|
| hongwei yang wrote: |
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point?
thanks
Hongwei
|
The "and" in the trigger section means now "coincidence". So the V4 board can trigger on a coincidence between two or more channels. If there is no pulse at the same time on the coincidence channels, the board will of course not trigger. The according firmware was introduced in V4, so please look at drs4_eval4_app.vhd (not eval3).
I just realized that the V4 firmware might be missing in the distribution, so I have attached it here. Look for drs_ctl_trigger_config.
Best regards,
Stefan
|
Ah, great, that helps, Thank you!
Hongwei |
|
Thu Nov 1 20:25:53 2012, hongwei yang, DRS4 firmware
|
| hongwei yang wrote: |
|
| Stefan Ritt wrote: |
|
| hongwei yang wrote: |
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point?
thanks
Hongwei
|
The "and" in the trigger section means now "coincidence". So the V4 board can trigger on a coincidence between two or more channels. If there is no pulse at the same time on the coincidence channels, the board will of course not trigger. The according firmware was introduced in V4, so please look at drs4_eval4_app.vhd (not eval3).
I just realized that the V4 firmware might be missing in the distribution, so I have attached it here. Look for drs_ctl_trigger_config.
Best regards,
Stefan
|
Ah, great, that helps, Thank you!
Hongwei
|
By the way, will there be a drs4_eval4.vhd as well? |
|
Thu Nov 1 20:32:03 2012, Stefan Ritt, DRS4 firmware
|
| hongwei yang wrote: |
|
| hongwei yang wrote: |
|
| Stefan Ritt wrote: |
|
| hongwei yang wrote: |
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point?
thanks
Hongwei
|
The "and" in the trigger section means now "coincidence". So the V4 board can trigger on a coincidence between two or more channels. If there is no pulse at the same time on the coincidence channels, the board will of course not trigger. The according firmware was introduced in V4, so please look at drs4_eval4_app.vhd (not eval3).
I just realized that the V4 firmware might be missing in the distribution, so I have attached it here. Look for drs_ctl_trigger_config.
Best regards,
Stefan
|
Ah, great, that helps, Thank you!
Hongwei
|
By the way, will there be a drs4_eval4.vhd as well?
|
Here it is. |
|
Thu Nov 1 20:46:53 2012, hongwei yang, DRS4 firmware
|
| Stefan Ritt wrote: |
|
| hongwei yang wrote: |
|
| hongwei yang wrote: |
|
| Stefan Ritt wrote: |
|
| hongwei yang wrote: |
|
Hi,
We are using drs4 board, but oscilloscope app will somehow stop to work if we config trigger into "or and", When I look into the drs4 firmware file drs4_eval3_app.vhd, I couldn't find the trigger_config value assignment which is mentioned at(#7 offset 0x1E from 31 downto 16) in manual_version 4.
could you help me find this trigger_config access point?
thanks
Hongwei
|
The "and" in the trigger section means now "coincidence". So the V4 board can trigger on a coincidence between two or more channels. If there is no pulse at the same time on the coincidence channels, the board will of course not trigger. The according firmware was introduced in V4, so please look at drs4_eval4_app.vhd (not eval3).
I just realized that the V4 firmware might be missing in the distribution, so I have attached it here. Look for drs_ctl_trigger_config.
Best regards,
Stefan
|
Ah, great, that helps, Thank you!
Hongwei
|
By the way, will there be a drs4_eval4.vhd as well?
|
Here it is.
|
Thanks. have a good day |
|
Fri Oct 12 14:06:04 2012, Moritz von Witzleben, DRS abbreviation
|
Hello,
what is the abbreviation of DRS?
Thanks and kind Regards,
Moritz |
|
Fri Oct 12 14:09:37 2012, Stefan Ritt, DRS abbreviation
|
| Moritz von Witzleben wrote: |
|
Hello,
what is the abbreviation of DRS?
Thanks and kind Regards,
Moritz
|
Domino Ring Sampler. |
|